安徽供应智能装车系统规格,装车机器人
-
面议
及时发货
交易保障
卖家承担邮费
实现作业现场系统监控,通过集中监控室,可了解所有作业现场情况,确保安全、准确作业。
人机交互有声光提示,确保析架机器人作业和托盘更换作业有序进行,不受干扰。
具备作业现场保护功能,通过视觉检测是否有人入侵作业现场,码垛是否超限,实现系统告警或停止作业,确保人身和机器安全。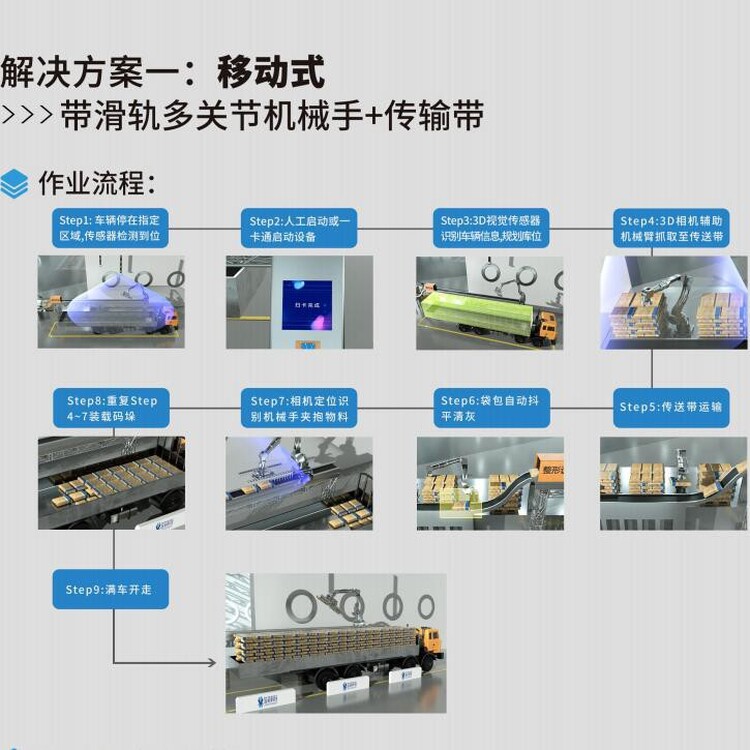
解决方案一:移动式
>>>带滑轨多关节机械手+传输带
作业流程:
Step1:车辆停在区域,传感器检测到位
Step2:人工启动或一卡通启动设备
Step3:3D视觉传感器识别车辆信息,规划库位
Step4:3D相机辅助机械臂抓取至传送带
Step 5:传送带运输
Step6:袋包自动抖平清灰
Step7:相机定位识别机械手夹抱物料
Step8:重复Step4~7装载码垛
Step9:满车开走
解决方案二:固定式>>>货车停靠装车
Step1:车辆停好,传感器检测到位
Step2:人工启动或一卡通启动设备
Step3:3D视觉传感器识别车辆信息,规划库位
Step 4:机械手智能规划抓取
Step5:根据库位规划整齐码放货物
Step6:重复Step4~5快速码垛装车
Step7:满车开走
停车引导及位置偏差自适应
水平停偏
当车辆出现水平偏差,装车 机通过码垛小车行走偏移量来弥补停车位 的偏差,容许的偏移量为单边15cm。
停车引导及位置偏差自适应
角度停偏
当车辆出现角度偏差,装车 机通过激光扫描得出的角度偏差,以及车 身长宽高来计算偏差递增量,电控根据给 出的递增量,在容许偏差单边15cm内来 进行码垛计算。