全封闭的机器人地轨、机器人行走轨道、机器人地面滑台 机器人导轨等,主要用于夸大机器人作业半径,扩展机器人使用范围功能,主要应用于焊接、铸造、机械加工、智能仓储、汽车、航天等行业领域。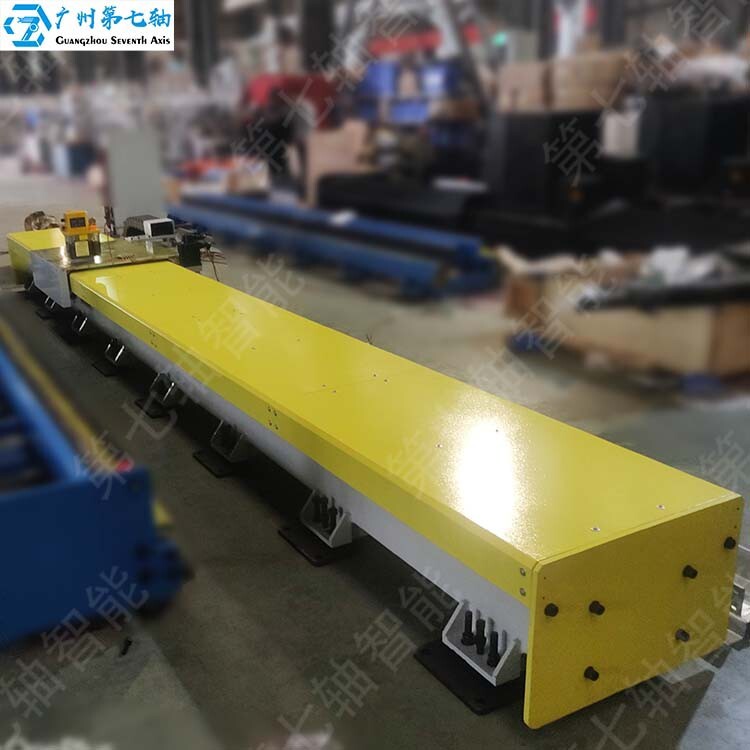
全封闭机器人第七轴是通过它的控制系统来控制机器人的移动,机器人安装在行走轴的滑座上,通过控制系统可按路线实行移动。机器人的移动就是第七轴上机械手移动小车的在直线方向上的移动,这是通过操作面板和显示屏进行编辑的,在有行程范围内,基本速度在1.2m-1.8m之间,可按客户要求调试,速度都是可调节的;而精度则是由编码器的精细检测再通过伺服系统控制电机来实现的,精度在±0.05mm范围内;机器人与第七轴的信号接口及机床系统接口是用数字信号进行传输的,可其稳定性和可靠性。
机器人全封闭地轨的系统功能
1.系统程序控制:地轨系统与“模架”的信号接口及系统接口全部都是采用数字信号传输,从而互相之间的稳定性以及牢靠性。具备手动和自动两种运转控制方式,手动当时下可单操作某一个工作,自动方式下按设定的运转程序自动运转。
2.软件功能作用:完成工位无序工作,即:随机发起工作信号,七轴可以依据发起的先后顺序一次完成工作;并且在信号复位后可以肃清掉一些未执行的信号。
3.急停连锁公用:随意激起任何一个急停按钮,七轴可以立刻中止正在完成的动作,只要在该急停重新复位后设备才回复正常运转。
4.信号保障性:在较短的时间内连续给出两次信号,机器人行走轴只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
5.移动与定位:可经过操作面板及显示屏直接编辑,理论上在直线轴有效行程范围内,能够设置无数个定位点。位置精度有编码器准确检测,经过伺服系统控制电机,精度在±0.5mm范围之内。
6.保养及维护:外用钥匙维护开关,当某个模架不用时(如:某个模架呈现毛病需维修),采用外用钥匙维护开关跳过此模架,这样不会由于人为的误操作或其他的不测而造成产品的报废。
7.急停按钮:每台模架具备在紧急状况时终止整个系统的急停按钮。
8.系统接口:一切硬件接口和软件功用由提供方对接,所有客户的需求。