优傲工业机器人维修保养图文结合
-
≥5台¥456.00
-
3-5台¥456.00
-
1-3台¥486.00
及时发货
交易保障
卖家承担邮费
优傲工业机器人维修保养图文结合
发那科FANUC,安川,川崎,史陶比尔,OTC,那智越等品牌,我公司对工业机器人示教器,触摸屏的无法触摸,触摸不灵,触摸不准,触摸偏移,黑屏,屏不亮,白屏,不显示,报警故障,通讯错误,无法通讯,无法连接。作为一家维修及保养工业机器人的公司,维修检测设备,不限品牌及型号,高度化。我们的技术师傅有着丰富经验和维修资格,能为客户解决各种现场疑难问题,周边地区还提供上门服务,更有负责同事一对一咨询。
转速涂料的密度有关,其上限由雾化的细度和静电涂装的效果来决定,实践经验表明,涂料应在恒定的速度下输入,在小范围内的波动不会影响涂膜质量,发那科喷涂机器人在实际的喷涂过程中每个旋杯所喷涂的区域不同,其涂料的流率等也不相同。定期1周一次。5.***好在U盘也做备份。6.太旧的备份定期删除,腾出硬盘空间。(三)机器人备份可以多台机器人共用吗?答:不行,比如说机器人甲A的备份只能用于机器人甲,不能用于机器人乙或丙,因为这样会造成系统故障。(四)对于机器人备份中什么文件可以共享?答:如果两个机器人是同一型号,同一配置。则可以共享RAPID程序和EIO文件,但共享后也要进行验证方可正常使用。(五)机器人出现报警提示信息10106维修提醒是什么意思?答:这个是ABB机器人智能周期保养维护提醒。(六)什么是机器人机械原点?机械原点在哪里?答:机器人六个伺服电机都有一个固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作。
资质3.备品具备货源优势,价格实惠,质量可靠4.拥有庞大库存及品牌供货商,易损配件大量储备5.现货备品下单即出,发货迅速,加急件顺风出货,长期合作更享免费送货上门服务(限广州附近客户)常见问题解答(FAQ):Q价格不同的备件价格不同。
现货备品下单后即可安排出货,特殊备品需要预定的话,业务员确定货期,Q你们是在哪里,可以上门考察吗,我们位于广州天河区,交通便利,欢迎上门莅临考察,:广科智能,出处,Tags:洁净机器人ABB机器人主板ACRB-033HNE|是工业机器人服务商。 维护备件g:ABB工业机器人标准维护保养,维护备件::106返回工业机器人标准维护,维护备件润滑油,2维护备件封装SMB电池,冷却风扇,防尘过滤器,接触器触点,电动机灯,丝2,本体标准维护常规检查1.本体清洁:根据现场工作清洁除尘。
优傲工业机器人维修保养图文结合
1、故障识别:,需要确定机器人的具体故障。这可能涉及到观察机器人的行为,查看是否有任何异常的指示灯或错误信息,或者检查机器人的日志文件以获取更多信息。
2、初步检查:在确定了故障之后,需要进行初步的检查。这可能包括检查机器人的电源和电线,查看是否有明显的物理损坏,或者检查机器人的软件和硬件。
3、诊断测试:如果初步检查无法确定问题所在,那么可能需要进行更深入的诊断测试。这可能涉及到运行特定的测试程序,以检查机器人的各个部分是否正常工作。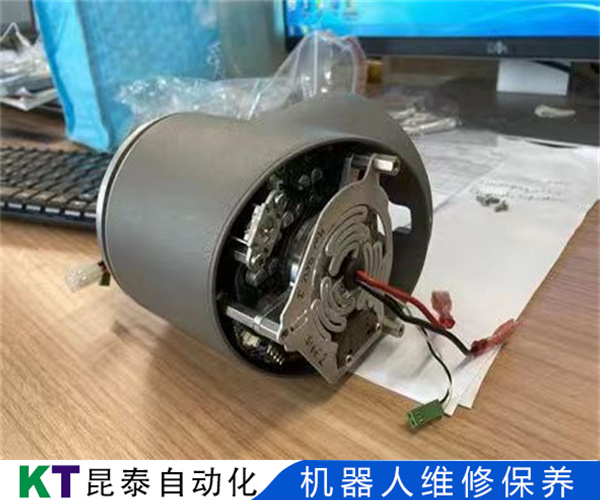
4、题:在进行了诊断测试之后,应该能够到问题的具体位置。这可能是一个硬件故障,比如电机或传感器损坏,也可能是一个软件问题,比如程序错误或配置问题。
5、维修或更换:一旦到问题,就可以进行维修或更换部件。如果是硬件故障,可能需要更换损坏的部件。如果是软件问题,可能需要修复程序错误或重新配置。
6、测试验证:在维修或更换部件之后,需要进行测试以验证问题是否已解决。这可能涉及到运行之前出问题的任务或程序,以确保机器人现在能够正常工作。
组织了一支经验丰富,技术强劲的维修团队与配备了强大的后备配件库存,资源整合后能以有效的速度和方法为进口示教器维修,示教盒维修,教导盒维修提供质的服务,安川首钢机器人示教盒维修是现在主营服务之一。更改更改机器人的操作步骤:1.运行方式T1,将光标放在要改变的指令行里。2.将机器人移到所要的。3.更改。指令相关的联机表格自动打开。4.对于PTP和LIN运动:按下Touchup(修整),以便确认TCP的为新的目标点。对于CIRC运动:按TouchupHP(修整点),以便确认TCP的为新的点。或者按TouchupZP(修整目标点),以便确认TCP的为新的目标点。5.是确认安全询问。6.用指令OK存储变更。库卡机器人控制柜维修,库卡机器人示教器维修,库卡机器人I/O板维修,库卡机器人驱动器维修,库卡机器人伺服电机维修,库卡机器人计算机板维修,库卡机器人电源板维修,库卡机器人安全板维修更改运动参数这种方法可用于以下更改:运动方式速度加速度轨迹逼轨迹逼距离1.将光标放在须改变的指令行里。
基坐标)时,会导致发生位移(例如:[矢量位移")机器人会发生变化,旧的点坐标依然会被保存并有效,发生变化的仅是参照系(例如基坐标)可能会出现超出工作区的情况,因此不能到达某些机器人,如果机器人保持不变。内部有断线等。(解决方法:更换数据线)上述故障如不能自行解决可随时我们何经理全天24小时服务,希望能在短内帮到您。维修优势有3点:加急件1-2个工作日就可解决故障,普通件3-5个工作日可修复,可提供上门维修服务。可提供备件使用,您不需要停产,不需要等待。的出仓合格率,我公司自备各系列MOTOMAN安川机器人,ABB机器人,KUKA机器人全套测试台。MOTOMAN示教盒维修流程步:询问用户产品的故障,了解其大概情况。第二步:客户邮寄至我方或珠三角地区我方现场取件,接到维修设备。第三步:入仓维修件信息记录,分配给工程师确认故障点,分析维修恢复的可行性。第四步:审核成本后由业务员评估报价,征求用户维修意见。
此外,在各方面的都正确合理的情况下还有误差出现,则可能是伺服包底层程序有问题,可以从补偿值正常的机器人中,在TP上找到点焊包ServoGun_TC的eg_lib_tc,src文件将其复制导入到有问题的机器人相应的程序中替代eg_lib_tc。
优傲工业机器人维修保养图文结合
1、需要确定跳闸的具体原因,然后采取相应的处理措施。可能的原因包括负载过大、电源问题、软件故障、电路短路等。
2、如果跳闸是由于负载过大引起的,可以考虑减少机器人的负载,尽量避免在负载高峰期使用机器人。此外,也可以考虑升级机器人的硬件设备,提升其负载承受能力。
3、如果跳闸是由于电源问题引起的,需要检查电源线路是否松动或损坏,并尝试更换电源适配器或使用稳定的电源。如果问题仍然存在,可能需要联系售后服务人员进行检修。
4、如果跳闸是由于软件故障或电路短路引起的,可以尝试重启机器人,看是否能够解决问题。如果问题仍然存在,可能需要升级或重新安装机器人的软件,或者联系人士进行检修或更换相关电路部件。
执行连接指令,使焊枪连接起来。连接后,不管电池类型如何,都可原样使用。弧焊机器人发那科机器人篇:发那科焊接机器人焊枪轴速度极限值不同(报警信号209)的维修方法篇:发那科焊接机器人对合动作中停止运作故障维修机器人保养>焊接机器人保养>>发那科焊接机器人在应用中常见的故障及解决措施发那科焊接机器人在应用中常见的故障及解决措施: :互联网 :介绍了发那科焊接机器人在实际生产操作应用中可能出现的故障问题如:咬边问题、气孔问题、飞溅过多问题等,并提供了解决措施,欢迎参考……介绍了发那科焊接机器人在实际生产操作应用中可能出现的故障问题如:咬边问题、气孔问题、飞溅过多问题等。 试生产,飞克机器人维修有限公司(faykrr)提供:发那科机器人控制柜维修,发那科机器人示教器维修,发那科机器人I/O板维修,发那科机器人驱动器维修,发那科机器人伺服电机维修,发那科机器人计算机板维修,发那科机器人电源板维修,发那科机器人安全板维修ABB维修案例发那科机器人维修ABB机器人维修安。
故障现象消失。对机械手进行初始化并导入系统备份程序,冷启动后再次示教,故障排除。例3FANUCR-2000iB/165F六轴点焊机械手工作过程中出现J4臂自动下滑现象,机械手报伺服故障,故障代码为SERVO-023,代码解释为:SERVOStoperrorexcess(Group:%1Axis:%4),当电机停止时,产生一个过度伺服错误。将机械手停止在任意时,机械手J4轴都有自动下滑现象,其他5轴均正常,确认属于机械手J4轴故障。由于J1~J6轴减速器刚换过油,故障原因可能是机械手伺服电封磨损,电机内进油导致抱闸不良,将机械手固定住。更换J4轴M4伺服电机后,对其J4轴做单轴的零点复归“SINGLEAXISMASTER。 检查电缆的包覆有无损伤,是否发生局部弯曲或扭曲,同时,请检查各电机的连接器是否松动,连接器检修部位J1可动部,J2手臂后方的手腕姿势保持连杆上下端,J2J3连接部,J3J4连接部的可动部与外围设备容易干涉的固定部电缆有关J2J3连接部。
2)机器人通电开机正常后,等待30秒,3)机器人关电,打开控制器柜子,拔下接头取下主板上的旧电池,4)装上新电池,插好接头2.更换机器人本体上的电池机器人本体上的电池用来保存每根轴编码器的数据,因此电池需要每年都更换。
TgEfOguVtKf