合肥出售晶圆扶梯
-
面议
及时发货
交易保障
卖家承担邮费
晶圆升降机构隶属于晶圆自动传输系统,主要承担着与晶圆装卸机械手配合完成晶圆在加工工件台与预对准设备、晶圆盒之间交接的工作。大尺寸的晶圆重量增加,更易变形破损,Z 轴方向上的定位(重复定位)精度直接影响晶圆在过渡过程中平稳安全性;同时要考虑到结构紧凑、洁净化、低散热对环境影响尽量小。
晶圆升降机构需要完成升降运动,采用直线电机驱动。直线电机是一种将电能直接转换成直线运动,而不需要通过任何中间转换机构的新颖电机。其代表是音圈电机,音圈的绕制方向与磁场方向垂直,具有喇叭状的辐射磁场,音圈通电后在磁场中会产生力,力的大小与施加在线圈上的电流成比例。电机运动形式可以为直线或者圆弧,主要用在精密仪器上。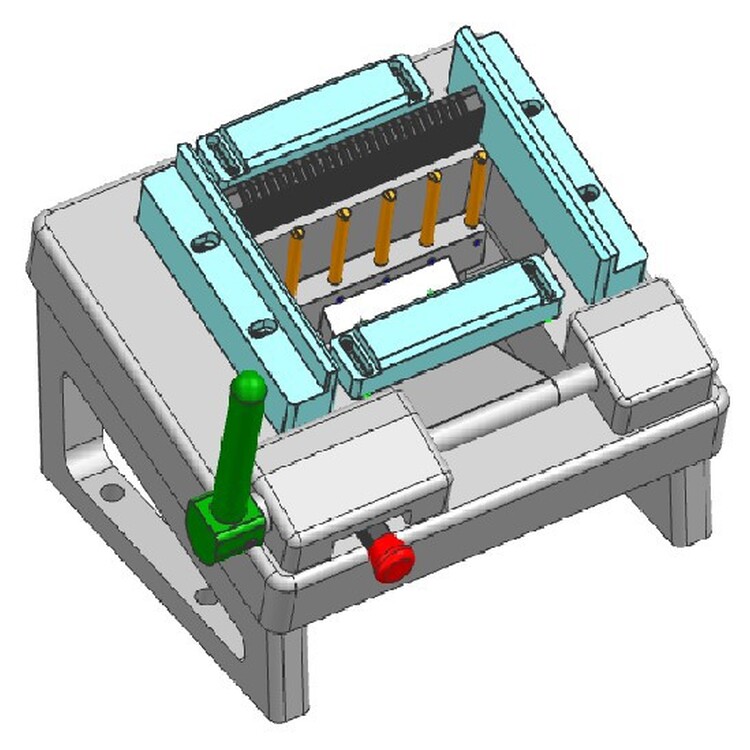
晶圆升降机构中的真空吸附系统是用来吸附和释放品圆,从而进行晶圆的检测和传输,以便实现传输的。机构要求晶圆定位精度高,真空吸附系统在吸附和释放晶圆过程中尽量减小冲击,要求吸附的时候应当缓慢地增加或减小真空压力,使得压力变化为斜坡变化,大限度减小晶圆在真空吸附下精度的损失。
晶圆上表面有定位用的标识,晶圆在预对准阶段确定好了与传输机械手的相对位置,经过升降机构到达工件台吸盘上,为了检测标识位需要其与吸盘相对位置是固定的。因此要求升降机构在圆周方向上不存在转动。同时光栅传感器安装要求光栅尺与读数头相对位置在+0.1mm。防转装置能机构运动圆周方向相对位置,晶圆传输的精度。
晶圆升降系统是半导体制造中重要的工艺设备之一,常规的晶圆升降系统通常有两种:其中一种晶圆升降系统包括:顶针、静电吸盘、组合支架及三个升降气缸,所述顶针通过所述组合支架固定在所述升降气缸上,当所述顶针托载晶圆时,所述升降气缸可以控制组合支架及托载晶圆的所述顶针相对静电吸盘上升或者下降一定的高度。但是,当组合支架使用时间过长时容易损坏,导致顶针,下降的高度不够,使得顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
另一种晶圆升降系统包括三个顶针、静电吸盘及三个升降气缸,一个升降气缸控制一个顶针的升降,采用该装置进行晶圆升降时发现,由于顶针的上升受升降气缸压力波动的影响,导致三个顶针的下降高度存在差异,使得其中某个顶针与晶圆的背面的间距过小,进而导致晶圆上累积的电荷在该顶针区域局部放电起辉造成放电,从而导致晶圆良率损失。
目前,半导体制程设备中,常常需要用电机通过传动带带动滚珠丝杆,来控制晶圆的升降。而传动带通过摩擦来传递动力,因此传动带要调整张紧力以获得合适的摩擦力。通过调整传动带的张紧度可以调整传动带和齿轮之间的摩擦力,传动带的张紧度可通过调节电机位置进行调整。另外传动带过紧会使传动带磨损严重,过松则易产生打滑现象,使传动带严重磨损甚至烧坏。