1756-CNB模块南通
-
面议
及时发货
交易保障
卖家承担邮费
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是-种补助马达间接变速装置。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,具有机电时间常数小线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为植流和交流伺服电动机两大类,主要特点是,当信号电压为零时无自转现象, 转速随着转矩的增加而匀速下降。
伺服电机内部的转子是永磁铁,驱动器控制的UN/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。
交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些, 因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。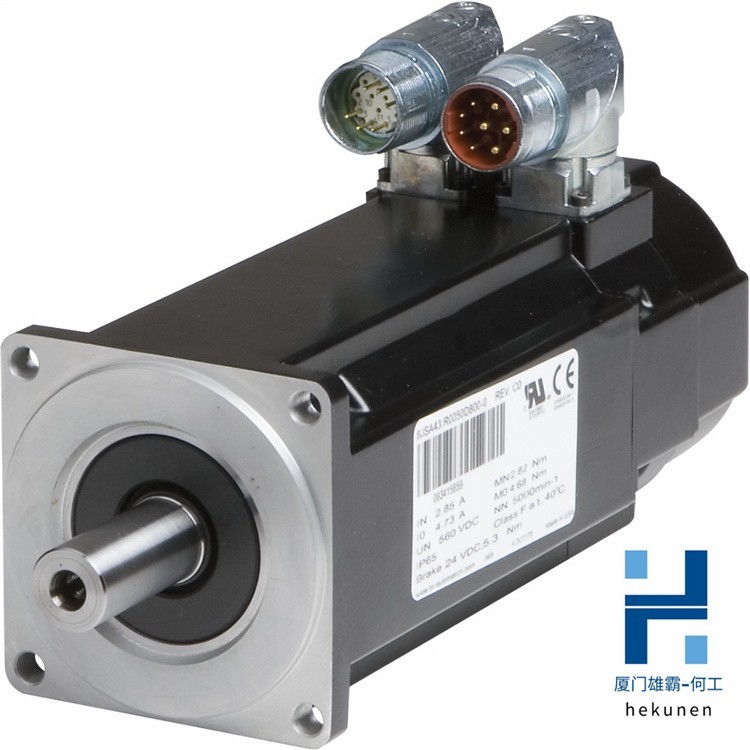
PLC输入、输出模块的种类:数字输入Dl,数字输出DO,模拟量输入AI,模拟量输出AO。数字的输入输出一般都是24V的.模拟量的2类4种量,2类分别是电压型和电流型电压型有0-10V和-10到10V.电流型主要有4-20MA,0- 20MA.然后模块再通过A/D转换把模拟量转换成+ 32767~-32768之间的数然后再实行控制。 信号模板的作用是把各种过程i/o信号进行转换把输入的各种信号转换成数字量便于pl识别,处理和分析把输出转换成模拟给各种调节机构去执行或将输出转换成2位式do量,去控制一些设备如启动停止、接通和断开等
plc开关星输出类型大致分为三种,继电器输出型、晶体管输出型和可控硅输出型. R-=继电器; T-晶体管继电器输出交流直流都可以,晶体管常见有5vdc和24vdc输出,可控硅比较少见只有特殊输出型号才有.考虑选用的输出模块类型,通常继电器输出模块具有价格低、使用电压范围广(可接市电)、 负载能力大, 导通压降小,承受瞬时电压和过电流的能力较强,但寿命短、响应时间较长、动作速度较慢等.晶体管输出(可分PNP、 NPN型)优点是通断速度快(脉冲输出,适合高频)
-般为0. 2ms左右;命长;缺点是工作电压低(不能接市电) ;负载能力弱,300mA左右。
可控硅输出模块适用于直流负载,开关频繁,反应速度快,寿命长电感性低功率因数负荷场合,但价格较贵,过载能力较差.
在以后的近30年间,DCS先与成套设备配套,而后逐步扩大到工艺装置改造上,与此同时,也分成大型DCS和中小型DCS两类产品,使其性能价格比更具有竞争力。DCS产品虽然在原理上并没有多少突破,但由于技术的进步、外界环境变化和需求的改变,共出现了三代DCS产品。1975年至80年代前期为 代产品,80年代中期至90年代前期为第二代产品,90年代中期至21世纪初为第三代产品。DCS系统中,控制站作为-个完整的计算机,它的主要I/O设备为现场的输入、输出处理设备,以及过程输入/输出(PI/O) ,包括信号变换与信号调理,A/D、 D/A转换。 控制站是整个DCS的基础,它的可靠性和安全性为重要,死机和控制失灵的现象是不允许的,且冗余、掉电保护、抗干扰、构成防爆系统等方面都应很有效而可靠,才能满足用户要求。
实际的DCS操作站是典型的计算机,它与控制站不同,有着丰富的外围设备和人机界面。在人机界面方面,逐渐过渡为以GU图形用户界面为平台并采用鼠标,组态时制作流程图和控制回路图等采用菜单、窗口等,使人机界面友好。第三代DCS操作站是在个人计算机(PC) 及Windows操作系统普及和通用监控图形软件已商品化的基础上诞生的。DDE或OPC接口技术,以太网接口与管理网络相连。DCS系统组态、操作站组态、控制站组态均有相应软件,为DCS用户的工程设计人员提供人机界面。有的DCS的采用通用监控图形软件,或以此类软件为核心,进行_次开发。因为数据通信标准牵涉到网络结构、通信介质(信道)、 通信协议、 IEEE802 4令牌总线传输方式和IEEE802.5令牌环网传输方式的通信协议在DCS系统中应用广, 是否能够成为今后DCS的通讯标准,还有待观察。