1756-L61B模块常州
-
面议
及时发货
交易保障
卖家承担邮费
在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度坏的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增 量式光电编码器作为测速传感器,与其对应的常用测速方法为M/测速法。M测速法里然具有-定的测星精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内检测到至少-个完整的码盘脉冲,限制了低可测转速:2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能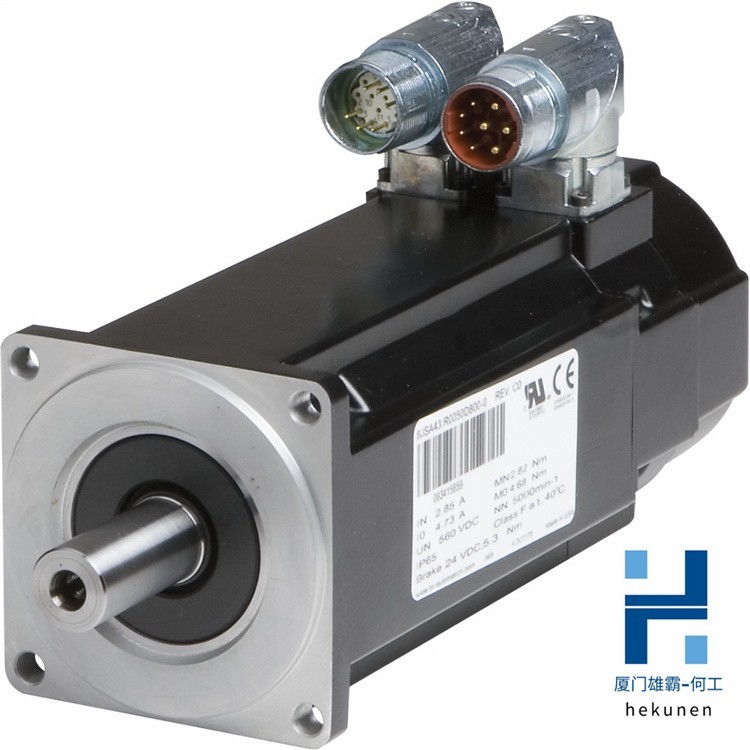
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是-种补助马达间接变速装置。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,具有机电时间常数小线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为植流和交流伺服电动机两大类,主要特点是,当信号电压为零时无自转现象, 转速随着转矩的增加而匀速下降。
无线通信模块原理无线通信模块的工作原理要是将数字信号转换成无线电信号进行传输,并在接收端将无线电信号还原成数字信号,以实现数据传输和通信连接。具体来说,发送端的模块会将数字信号通过微控制器进行调制,然后由射频收发器将其转换为无线电信号,后通过天线进行发送;接收端的模块则会利用天线将无线电信号接收下来,并经过射频收发器进行放大、滤波等操作,终被微控制器还原成数字信号
在以后的近30年间,DCS先与成套设备配套,而后逐步扩大到工艺装置改造上,与此同时,也分成大型DCS和中小型DCS两类产品,使其性能价格比更具有竞争力。DCS产品虽然在原理上并没有多少突破,但由于技术的进步、外界环境变化和需求的改变,共出现了三代DCS产品。1975年至80年代前期为 代产品,80年代中期至90年代前期为第二代产品,90年代中期至21世纪初为第三代产品。DCS系统中,控制站作为-个完整的计算机,它的主要I/O设备为现场的输入、输出处理设备,以及过程输入/输出(PI/O) ,包括信号变换与信号调理,A/D、 D/A转换。 控制站是整个DCS的基础,它的可靠性和安全性为重要,死机和控制失灵的现象是不允许的,且冗余、掉电保护、抗干扰、构成防爆系统等方面都应很有效而可靠,才能满足用户要求。
采用新的的微处理器和电子技术达到快速的扫描时间;小型的、低成本的PLC,可以代替四到十个继电器;
:高密度的I/0系统,以低成本提供了节省空间的接口;
基于微处理器的智能I/O接口扩展了分布式控制能力,典型的接口如PID,网络, CAN总线,现场总线, ASCII通信, 定位,主机通讯模块和语言模块(如BASIC, PASCALC) 等;
包括输入输出模块和端子的结构设计改进,使端子更加集成;
特殊接口允许某些器件可以直接接到控制器上,如热电偶、热电阻、应力测量、快速响应脉:冲等;
外部设备改进了操作员界面技术,系统文档功能成为了PLC的标准功能。
以上这些硬件的改进,导致了PLC的产品系列的丰富和发展,使PLC从小的只有10个I/O点的微型PLC,到可以达到8000点的大型PLC,应有尽有。这些产品系列,用普通的I/0系统和编程外部设备,
工业自动化是指机器设备或生产过程在不需要人工直接干预或较少干预的情况下,按预期的目标实现测量、操纵等信息处理和过程控制的统称。按功能划分,自动化控制具体包括控制系统、驱动系统、反馈系统、执行系统、运动控制系统等,其中的控制系统被称为是工厂的"大脑”,是工业生产尤其是流程工业的和基础,安全稳定性、效率性直接影响生产F流程各个生产环节。传统控制系统-般包括仪器仪表系统、DCS系统、PLC系统、 SIS系统、 SCADA系统、执行调节系统等。即集散控制系统,由输入输出模块、通信模块、控制器和人机界面组成,是- 种以控制器和现场设备为基础,将相关工艺信号汇集到系统中,由操作站进行监视或其他控制操作,以分散控制、集中操作、分级管理为主要特征的工业自动化控制系统。侧重于局部逻辑控制相比,DCS更注重模拟量的控制,因此DCS系统拥有更强的数据传输和管理能力,这也是大型项目广泛应用DCS系统的主要原因。