KUKA机器人黑屏维修发热
-
≥5台¥456.00
-
3-5台¥456.00
-
1-3台¥486.00
及时发货
交易保障
卖家承担邮费
KUKA机器人黑屏维修 发热
部分产品提供6-12个月保修,KUKA库卡机器人CCU板洁净机器人库卡KUKA机器人主机241467全新二手备件销售维修|产品参数品牌:KUKA库卡名称:KUKA库卡主机型成色:全新/二手数量:长期备有现货价格:电议KUKA库卡主机维修找。机器人过压维修涉及对机器人系统中因电压过高而引发的故障进行诊断和修复。过压故障可能会导致电路损坏、电子元件烧毁或其他严重问题。以下是机器人过压维修的一般步骤和辨析:
(1)诊断过压原因:
电源问题:检查电源供应是否稳定,是否有过高的电压输出。
电路故障:检查电路板上的元件是否损坏,如电容器、电阻器或集成电路。
传感器或控制器故障:这些元件可能误读电压值,导致过压。
外部干扰:如电磁干扰(EMI)或静电放电(ESD)可能导致电压异常。
我们拥有一支技术力量强大的工程师队伍,掌握ABB直流调速电机维修的核心技术,拥有的设备检测仪器平台和的故障排除维修方法,对ABB直流电机调速器进行级维修,为您解决产品故障所导致生产停滞的燃眉之急。 铝合金,高纯度陶瓷等多种材质构成,并且配置降温系统,可以在温度变化大的环境中保持率的运行,SANKYO洁净室搬运机器人本体拥有符合卫生标准的涂装,机体密封设计可以防止油脂,油污和微粒等污染物泄漏,而且其机械设计可以程度地减少机器人关节间隙。
因维修周期长,费用高,这给无备件或严格控制成木的用户造成非常大的生产影闷句。安川MOTOMAN示教器维修故障及解决方法1,安川MOTOMAN示教盒触摸不良或局部不灵.(解决方法:更换触摸面板)2,安川MOTOMAN示教盒无显示。(解决方法:维修或更换内部主板或液晶屏)3,安川MOTOMAN示教盒显示不良、竖线、竖带、花屏,摔破等。(解决方法:更换液晶显示屏)4,安川MOTOMAN示教盒按键不良或不灵。(解决方法:更换按键面板)5,安川MOTOMAN示教盒有显示无背光。(解决方法:更换高压板)6,安川MOTOMAN示教盒操纵杆XYZ轴不良或不灵。(解决方法:更换操纵杆)7,急停按键失效或不灵。(解决方法:更换急停按键)数据线不能通讯或不能通电。
KUKA机器人黑屏维修 发热
(2)安全防护措施:
在维修前,确保断开机器人的电源,并使用适当的防护工具,如绝缘手套和防护眼镜。
使用电压表或示波器测量电压,确保在维修过程中电压处于安全范围内。
(3)修复或更换损坏元件:
如果发现电路板上的元件损坏,如电容器爆裂或电阻器烧焦,应将其更换为新的元件。
如果传感器或控制器出现故障,可能需要对其进行修复或更换。
(4)检查和调整电路:
检查电路板上的连接和焊接点,确保它们没有松动或短路。
根据需要调整电路参数,如电阻值、电容值或电感值,以确保电路正常工作。
我们可免费提供备件使用,您不需要停产,不需要等待,工业机器人服务商,服务项目包含:工业机器人销售,机器人备件,机器人维修,机器人保养,机器人调试,机器人改造和机器人培训等,主要针对ABB,库卡KUKA。广州安川机电科技有限公司作为安川焊接机器人焊机维修服务领域的“者”,高超的技术水和的服务,已被为部分品牌的企业安川焊接机器人焊机维修与保养服务的机构。我们拥有多年的安川焊接机器人焊机维修经验,精通安川MOTOMAN焊接机器人焊机维修、工业焊接机器人焊机维修、大功率焊接电源维修等。技术机器人焊机维修机器人焊机维修>安川MOTOMAN机器人MOTOWELD-E350系列焊机维修产品编:Pro机器人焊机维修|产品名称:安川MOTOMAN机器人MOTOWELD-E350系列焊机维修产品编:Pro产品安川MOTOMAN机器人MOTOWELD-E350系列焊机维修包括:安川MOTOMAN机器人MOTOWELD-E350焊机维修安川MOTOMAN机器人MOTOWELD-E350II焊机维修安川MOTOMAN机器人MOTOWELD-E350III焊机维修广州安川机电科技有限公司作为安川焊接机器人焊机维修服务领域的“者”。
src(件要备份),再验证是否能解决问题,安川维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例安川维修案例安川机器人电机长停机维护资料/12/12:为了帮助假期中安川机器人等设备运行停止的客户快速恢复生产。消费者对于大尺寸液晶电视的需求日益增加,间接带动面板厂家在LCD的投入与产能的扩充,以及技术的改进,这就让传统的生产模式不能满足要求,面板厂家大量使用自动化设备来进行玻璃搬送,也就是所谓的AMHS系统(AutomationMaterialHandlingSystem,自动化物料搬运系统),以自动化的生产方式来提升工作效率及生产质量。AMHS自动物料搬运系统直接影响液晶制造系统的性能和效率,而在影响AMHS效率的众多因素中,搬送路径的规划及搬送设备的调度无疑是核心的问题,所以AMHS能否在各个细节贴合客户工厂生产需求重要。但是客户在采购的时候,很多细节的地方难免会考虑不周全,到了安装调试时,才发现有些地方不能很好的满足自己的需求。
库卡维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例库卡维修案例kuka机器人外部轴配置维修保养/12/15:我们在kuka机器人维修保养过程中。
KUKA机器人黑屏维修 发热
(5)测试和验证:
在完成修复后,重新连接电源,并进行系统测试,确保电压在正常范围内,且机器人能够正常工作。
如果可能,使用示波器或其他诊断工具进行进一步的验证。
(6)预防措施:
使用合适的电源保护设备,如稳压器或浪涌保护器,以减少过压的风险。
定期检查和维护机器人系统,确保电路和元件处于良好的工作状态。
避免在电磁干扰较大的环境中使用机器人。
如下图3.若运动指令中,使用\T:=1,则完成该运动语句为1s,代替原有v1000速度4.ABB机器人还提供以下速度指令5.可以使用速度指令Velset80,50指令来批量速度,其中80表示后续速度乘以80%。注释如果在执行步骤7.b到步骤7.d期间意外松开了SHIFT(位移)键,则需重复上述步骤。8如果未对机器人进行校准,则执行如下步骤:注释对于如下步骤,按住SHIFT(位移)键,直到已经完成步骤8.a到步骤8.d的操作。a按住SHIFT(位移)键,并按F2RESET(复位)。等待伺服电源。b按COORD(坐标系)键,直到选择JOINT(关节)坐标系。c继续按住DEADMAN(紧急时自动停机)开关,并打开示教操作盘开关。d对已经超程的轴进行点动,脱离超程开关。完成点动后,可以松开SHIFT(位移)键。注释如果在执行该步骤时意外松开了SHIFT(位移)键,则需重复上述步骤。9关闭示教操作盘开关,松开DEADMAN(紧急时自动停机)开关。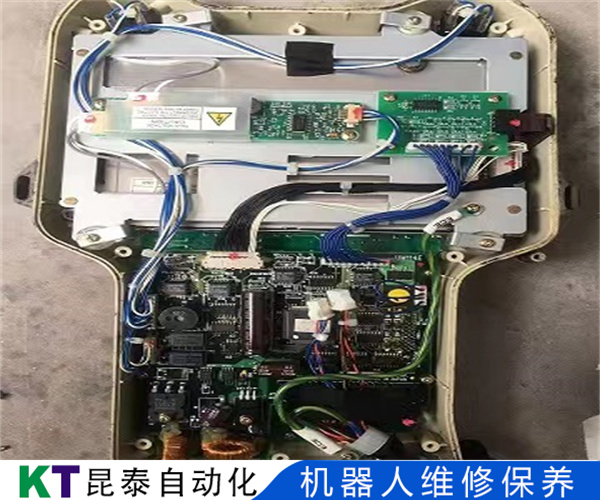
积累了见识和知识,这些知识不仅可以帮助公司解决机器人焊接系统中的问,机器人常见故障有哪些,川崎Kawasaki机器人电路板维修怎么选择才能找到一家的机器人维修服务商:1.我们需要了解机器人维修服务商的实力。 排压a,打开加油口,出油口加油完成后,拆除1#轴,2#轴,3#轴,5#轴加油口油嘴,所有排油口需打开,运动各关节END注意事项1.移动机器人时候,人要站在安全的地方,不要站在机器人的工作区2.废油按要求处理3.使用油脂更多机器人维修保养咨询请到:篇:教你发那科机器人保养应该做什么。
保养,调试,安装,培训,研发。供应及回收ABB机器人主机,abb示教器,提供机器人维修服务。---ABB机器人系统集成商---买备件,找广州广科,有!广期供应:原装全新一手货源!产品图片信息仅供参考,请来电咨询!我们期待您的来电!机器人备件中心--广州广科智能技术有限公司广州广科智能技术有限公司沈::://gkznjs:广州市黄埔区永红西街3号ABB机械手IRC5示教器维修特点:工业机器人IRC5测试台检测,的出仓合格率。维修工程师全职全责,服务到底。易损配件大量备储:ABB机器人IRC5示教器、ABB机械手IRC5示教盒液晶屏、ABB示教器触摸板、ABB示教器主板、机器人通讯电缆、IRC5示教器按键面板等。TgEfOguVtKf