塘沽性能稳定桁架机械手解决方案,厂家定制XYZ桁架机械手
-
¥388000.00
及时发货
交易保障
卖家承担邮费
桁架机械手的空间运动是用三个相互垂直的直线运动来实现的。桁架式机械手通过工业控制器(如:PLC,运动控制,单片机等)实现。由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到的位置精度(μm级)。
桁架机械手的结构尺寸要比其他类型的机器人的结构尺寸大得多。桁架式机器人的工作空间为一空间长方体。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
桁架机械手又叫直角坐标机器人或龙门式机器人。桁架机械手和数控机床紧密配合,组成无人上下料机加工系统,能够大大的提高工作效率,降低用工成本。广泛应用于数控车床、加工、磨床、插齿机、清洁机等设备进行加工自动化上下料。
桁架机械手常见应用的有机床上下料机器人、码垛机器人、涂胶(点胶)机器人、检测机器人、打磨抛光机器人、装配机器人、医疗机器人等。好的桁架机械手,发展铸造、热处理方面的机械手,以减轻劳动强度,改善作业条件,在应用机械手的同时,相应的发展通用机械手,有条件的还要研制示教式机械手、计算机控制机械手和组合机械手
桁架机械手主要由立柱等结构件组成,其作用是将各轴架空至一定高度,多由铝型材或方管、矩形管、圆管等焊接件构成;主要构成有X轴组件、Y轴组件、Z轴组件。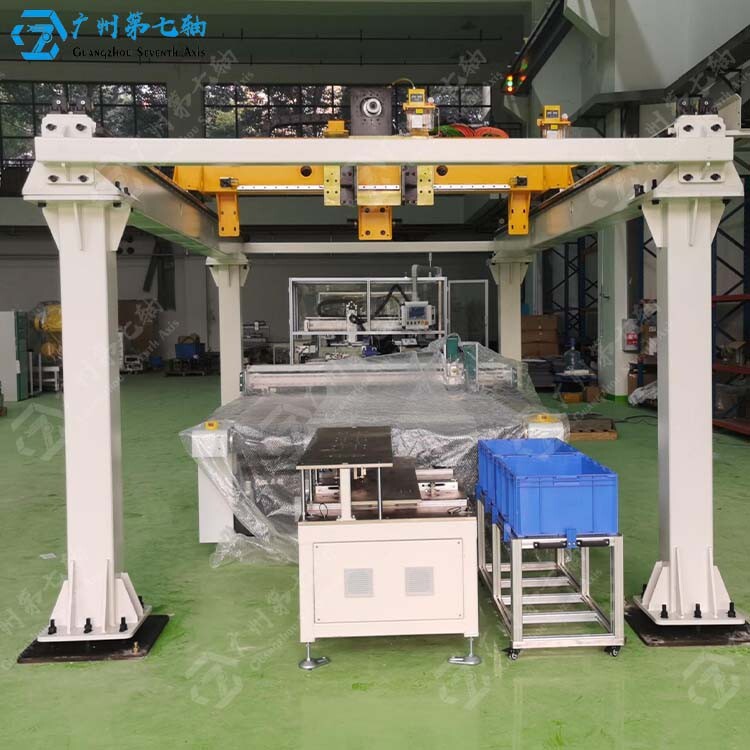
桁架机械手的三个运动组件为桁架机械手的核心组件,其定义规则遵循笛卡尔坐标系。各轴组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。