日本横河直接驱动电机故障维修芯片级
-
≥3台¥384.00
-
2-3台¥384.00
-
1-2台¥485.00
及时发货
交易保障
卖家承担邮费
日本横河直接驱动电机故障维修芯片级 人机界面,控制面板常见故障现象有:通电不显示,触摸屏不灵,触摸后鼠标跑偏,面板按键无反应,触摸表面碎裂,花屏,白屏,闪屏及程序等故障维修,机器人伺服电机常见故障现象有:伺服电机报警,无显示,缺相,过流。
凌坤自动化以技术实力为依托,建有商务部、业务部、技术部、售后部,经过多年耕耘,凌坤自动化实现了跨越式发展,得到了各大企业的普遍认可,获得多项殊荣。总公司拥有50几名技术的工程师,技术在行业内都是厉害的。目前有员工七十多名,其中维修工程师50几名,拥有雄厚的维修实力,是值得您信赖的维修公司。 凭着高科技和的测试维修设备、良好的服务保障在消费者心目中竖立了良好的企业形象。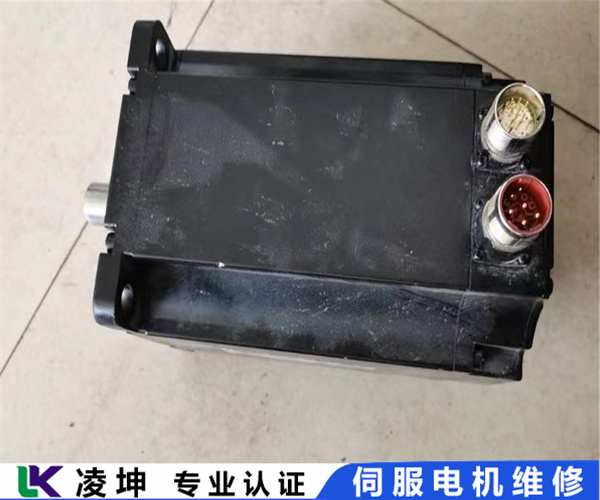
刹车失灵,刹车片磨损,低速正常高速偏差,高速正常低速偏差,启动报警,启动跳闸,过载,过压,过流,不能启动,启动无力,运行抖动,失磁,跑位,走偏差,输出不衡,编码器报警,编码器损坏,不准,一通电就报警,一通电就跳闸。 二十年来我们公司凭借着技术人才和的维修测试设备使得的修复率达到95%以上,成为同行业中的,ABB机器人伺服电机随着机器人频繁的使用以及的积累,不免会出现设备的耗损和破坏,导致ABB机器人不能正常运作。 optionalboard使用外部选件板时出现严重错误(CBSCSY,,)·更换CU板·更换LBA板·更换选件板FF06Stackoverflow堆栈上溢对于VC:增加取样(P357)对于MC:减小脉冲频率(P340)·更换CU板FF13Wrongfirmwareversion固化软件和硬件。
日本横河直接驱动电机故障维修芯片级
1.如果未知伺服电机的正确对齐数据,则在拆卸电机之前收集该数据,以便在组装过程中正确地重新对齐。
2.拆卸电机后,再次将编码器对齐,以使其与转子上的磁铁和定子绕组正确对齐。
3.如果更换了编码器,则调整组件。
4.换向的动态对准(在旋转时设定)是通过在正向方向上反向驱动电机并使用示波器将定子/转子的产生电压输出与相应的换向通道进行比较来实现的。
5.示波器从线到线的定子电压轨迹以及来自相应霍尔开关的方波波形代表一相到相电压和一个转子位置反馈信号。
6.大多数单元将具有三个位置反馈信号,这些信号将匹配多达三个线对线电压输出。
7.当反馈输出与其电压输出正确匹配时,调整一组输出也将调整其余两个。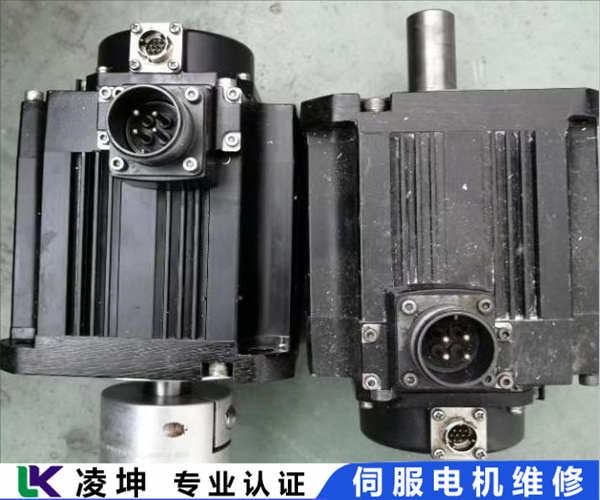
只需要重新编制程序就能完成对零件的加工。它不同于的机床,不需要制作、更换许多工具、夹具和检具,更不需要重新机床。(2)加工精度高数控机床是以数字方式给出指令进行加工的,由于现在数控设备的脉冲当量(即每输出一个脉冲后数控机床移动部件相应的移动量)一般达到了0.001垃垃,并且进给传动链的反向间隙与丝杠螺距差错等均可由数控设备进行补偿。因而,数控机床能达到比较高的加工精度和质量性。因而,在数控机床大修中能够快速地从加工一种零件转变为加工另一种零件,这就为单件、小批以及试制新产品提供了的便当。它不只缩短了设备调剂生产周期,并且节省了很多工艺装备费用。这是由数控机床结构设计采用了必要的办法以及具有机电结合的特色决定的。
日本横河直接驱动电机故障维修芯片级
凌坤自动化技术人员使用制造商软件,并将编码器对准工厂规格。编码器因品牌而异。它们也非常脆弱,可能有些挑剔。成功对准后,使用型号特定的驱动器或放大器对伺服电机进行2-3小时的运行测试。如果没有适当的重新对准,交流伺服电机将无法工作。
全系列川崎机器人测试台,提供技术咨询,川崎机器人维修机器人控制系统维修/机器人伺服电机/示教盒维修川崎机器人驱动模块/伺服包/电源维修/机器人电路板/基板维修川崎机器人本体维修/伺服电机/伺服马达维修川崎机器人机器人齿轮箱/齿轮变速机/谐波减速机/减速机Kawasaki川崎机器人示教盒维修常见故障及。 有所不同,机器人没有疲劳,一天可24小时连续生产,另外随着高速焊接技术的应用,使用机器人焊接,成本降低的更加明显,便于安排生产计划由于机器人可重复性高,只要给定参数,就会永远按照指令去动作,因此机器人焊接产品周期明确。 6SE7021-0TP60-Z维修,6SE7021-0TP60-Z维修,6SE7021-0TP70维修,6SE7022-6TP60维修,6SE7022-6TP60-Z维修,6SE7022-6TP70维修。 注意调节机器人运动方向,调整运动速度,离开撞车点,到达安全后把[允许运动"的数值调成5即可,9下列情况下kuka机器人需要重新标定零点机器人没有关闭下,蓄电池电量消耗殆尽后会丢失零点,机器人撞到硬限位了时。
日本横河直接驱动电机故障维修芯片级修复,更换测速机。维修实践中。测速机电刷磨损、卡阻故障较多,此时应拆下测速机的电刷,用纲砂纸打磨几下,同时清扫换向器的污垢,再重新装好。西门子1PH8107系列伺服电机刹车磨损/刹车失灵维修案例将数控系统轴Z由全闭环切换到半闭环工作状态。伺服电机与机械部分脱离后运行稳,电流正常。排除伺服电机及制动器故障,因此认定伺服电机超温报警是由于机械部分负荷过重所致。凌科自动化/服电机维修影响轴Z机械负荷过重的原因主要包括:电机减速箱内部齿轮损坏、滚珠丝杠螺母副磨损、丝杠轴承磨损、轴润滑不到位、衡油缸工作不正常及导轨副磨损等。上海西门子伺服电机维修安徽西门子伺服电机维修浙江西门子伺服电机维修苏州西门子伺服电机不转维修上海西门子伺服电机冒烟维修/江苏西门子伺服电机烧毁维修/苏州西门子伺服电机线圈烧维修/浙江西门子伺服电机修理/维修西门子伺服马达/维修西门子伺服电机/南京西门子伺服电机维修/杭州西门子伺服电机不转维修/镇江伺服电机编码器维修/伺服电机维修/西门子伺服电机烧毁维修/伺服电机不出力维修/电流大维修/带不了载维修/德国西门子伺服电机全系列产品修理/西门子伺服电机维1PA6105-4HF02-0BB3维修1PA61054HF020BB31PA6133-4NF00-0BA3维修1PA61334NF000BA31PA6163-4HF03-0BA3维修1PA61634HF030BA31PA6163-4NF00-0BA3维修1PA61634NF000BA31PH7101-2HF00-0BA3维修1PH71012HF000BA31PH7101-2HF00-0BB3维修1PH71012HF000BB31PH7101-2HF02-0BA3维修1PH71012HF020BA31PH7101-2HF22-0BB3维修1PH71012HF220BB31PH7101-2HF30-0BA0维修1PH71012HF300BA01PH7101-2MF00-0BA3维修1PH71012MF000BA31PH7101-2MF22-0BB3维修1PH71012MF220BB31PH7101-2NF03-0BA0维修1PH71012NF030BA01PH7103-2AD02-0BB3维修1PH71032AD020BB31PH7103-2AG20-0BJ3维修1PH71032AG200BJ31PH7103-2HD02-0BA0维修1PH71032HD020BA01PH7103-2HD02-0BB3维修1PH71032HD020BB31PH7103-2HD03-0BC3维修1PH71032HD030BC3西门子1PH8107系列伺服电机刹车磨损/刹车失灵维修案例常州凌科自动化科技有限公司是工控自动化设备伺服电机维修机构。 kjgsegferser