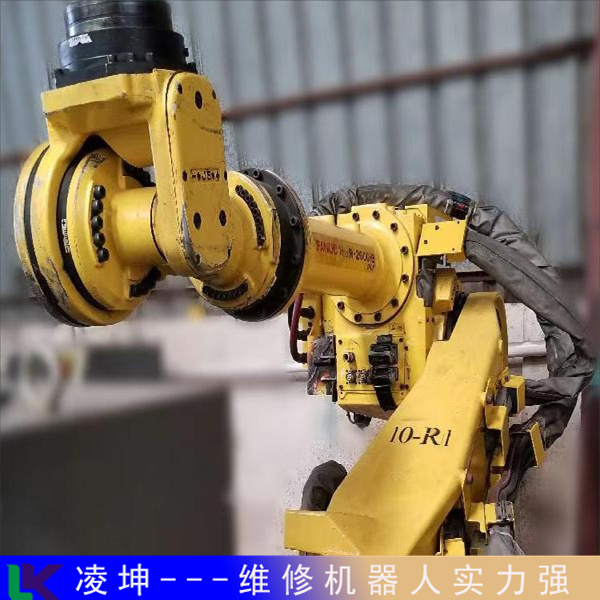
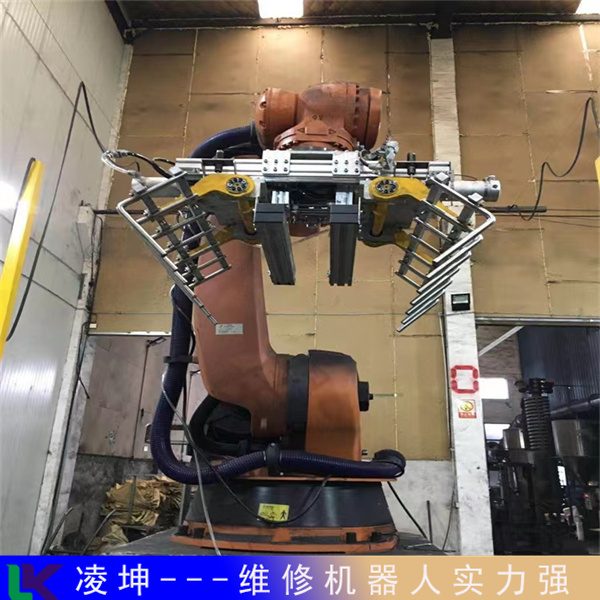
R-1000iA/80F发那科FANUC机器人维修保养测试好
-
≥3台¥358.00
-
2-3台¥358.00
-
1-2台¥498.00
及时发货
交易保障
卖家承担邮费
为了方便自己,请考虑在每次例行维护检查中完成基本清洁,并每六个月到一年进行一次深度清洁,为了去除灰尘,我们建议使用刷子将其从机器上敲下来,然后使用真空吸尘器将其清理干净,请注意,您不应直接在机器上使用真空吸尘器。
R-1000iA/80F发那科FANUC机器人维修保养测试好库卡KR3 R540、川崎RS007N、史陶比尔TX2-60L、那智越MC12S、松下HS系列、安川MOTOMAN-GP7等各种品牌型号维修欢迎咨询我们常州凌坤自动化,我们维修只要是硬件问题都是可以修复的,一般简单的故障我们当天就可以解决,维修周期短。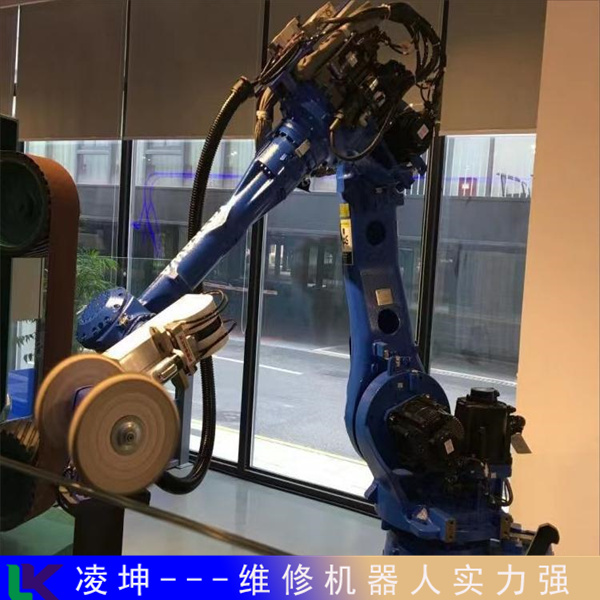
使它们远离产品的主要流程,但仍然可以完成工作,他们使用各种抓取工具,从真空夹具到机械夹具,这些有助于将生铝片之类的东西装入工业机器人折弯机,然后冲压出车门框架,像折弯机或焊接工业机器人这样的产品生产工业机器人的真正潜力只有在与机器装载或工业机器人相结合时才能实现。
工业机器人操作站选项操作站或“操作站”是运行整个工作单元的工业机器人系统的外部控制面板。工业机器人操作员站是任何工业机器人或工作单元的重要组成部分,为工作人员提供了对复杂工业机器人系统的简化按钮控制,减少了出错的机会。使用示教器对工业机器人进行编程后,操作员站可用于调用特定作业或在紧急情况下停止系统。运行工业机器人系统似乎是一项复杂的任务,但操作员站提供了用户友好的界面,使公司可以在几天甚至几小时内对整个工作单元的员工进行培训,即使员工之前没有工业机器人技术经验。操作站的设计可能会有所不同,但通常会有6到9个按钮,用于启动循环、保持循环、打开或关闭伺服电机、选择要运行的作业,重置安全故障,并在紧急情况下停止系统。
R-1000iA/80F发那科FANUC机器人维修保养测试好
机器人无法开机原因
1、电源插头与电源线:电源插头未插紧或电源线损坏,导致无法供电。检查电源插头和电源线是否完好,确保连接紧密。
2、电源开关:电源开关损坏或故障,无法正常开启。检查电源开关是否损坏,如有必要,更换新的电源开关。
3、电源模块:机器人内部电源模块故障。需要联系维修人员进行检查和修复。
4、主控制器:机器人的主控制器出现故障,导致无法启动。检查控制器的连接和状态,如有必要,重新启动控制器或进行复位操作。
5、操作系统或控制软件:机器人的操作系统或控制软件出现故障,导致无法正常启动。尝试重新启动机器人的软件系统,或进行软件升级。
6、硬件部件:机器人的某些硬件部件出现故障,如电机、传感器等,导致无法开机。检查机器人的各个硬件部件是否完好无损,如有损坏或异常,及时更换或修复。
公共汽车还是火车,工业机器人焊接单元可能都接触过它们,运输行业在1980年代转向自动化工业机器人系统,以改善其生产并跟上对其行业不断增长的需求,随着制造业的变化,公司开始意识到他们不仅需要更努力地工作。
PMC-R基于成功的PM4控制器,并提供增强的计算能力和数据传输。PMC-D提供对装甲工作面输送机驱动器的控制。PMC-V是用户界面,允许设置所有工作面输送机参数。PMC-P是一种节点计算机,可促进各个组件与其他矿山计算机网络之间的通信。Caterpillar与卡内基梅隆大学工业机器人研究所签署了一项为期三年的研究协议。这种伙伴关系导致工业机器人研究所的研究人员开发了用于采矿作业的大型运输卡车的自主版本。研究人员与卡特彼勒匹兹堡自动化中心密切合作。自动驾驶卡车将与卡特彼勒大的两辆载重为240吨的运输卡车配合使用。无人驾驶卡车是自动采矿运输系统的一部分,旨在通过一致性提高生产力。加快上市速度是Caterpillar的目标之一。
R-1000iA/80F发那科FANUC机器人维修保养测试好
机器人无法开机维修方法
1、电源连接与插座检查:确保电源线正确连接至工业机器人,并且电源插座工作正常。检查电源插座是否有电,以及电源开关是否已打开。
2、电源线与插头检查:检查电源线是否损坏,如有磨损或裸露的电线,需更换新的电源线。确保电源插头没有松动或损坏,并正确插入插座。
3、控制器状态检查:检查工业机器人的主控制器是否处于正常工作状态。如有必要,重新启动控制器或尝试复位操作。
4、电路板检查:打开机器人的外壳(如果可能),检查电路板是否有明显的损坏或烧焦痕迹。使用的电子测试工具对电路板进行测试,查找可能的故障点。
5、硬件部件检查:检查机器人的电机、传感器、执行器等硬件部件是否完好。如有损坏或异常,及时更换或修复。
6、连接线与接口检查:检查机器人内部和外部的连接线是否松动或损坏。确保所有接口都连接紧密且没有灰尘或污垢。