清远智能机器人地轨解决方案机器人第七行走轴
-
面议
及时发货
交易保障
卖家承担邮费
让一台机器人工作完跑到另一个工位工作或多个工位,从中产生一个行走机构,这种机构统称为机器人第七轴。
机器人第七轴是在行走轴导轨上安装一台机器人,使用电机驱动,具有重复定位精度高、响应速度快、运行平稳、可靠等特点,并为恶劣环境下使用,设计了防尘罩,保护直线导轨以及齿条等运动部件,大大提高了可靠性和使用寿命。
工业制造水平随着技术不断地发展,逐步从密集型转换成自动化和机器人生产,机器人应用不断的渗透到工业制造的各个角落,作为行走装置机器人-机器人第七轴,而机器人地轨的应用不仅提高了生产效率,还节省了许多人工成本,并且能在恶劣的环境下应用,减少了因生产环境造成的各种事故。
一般的工业机器人,在正常情况下有六个可控轴,如果必要时增加一个在轨道上行走的运动(例如,为了在装配线、传送线上多起动或后续的移动),也可以有七个可控轴。机器人地轨行走系统,其包括机架、六轴机器人手臂和驱动电机,在机架的上部设置有横向导轨,六轴机器人手臂通过行走机构电缆与驱动电机连接,在六轴机器人手臂的上部还设置有能够横向移动的第七轴,六轴机器人手臂的上部与横向导轨活动连接,在六轴机器人手臂的下部第六轴上安装有工装抓手。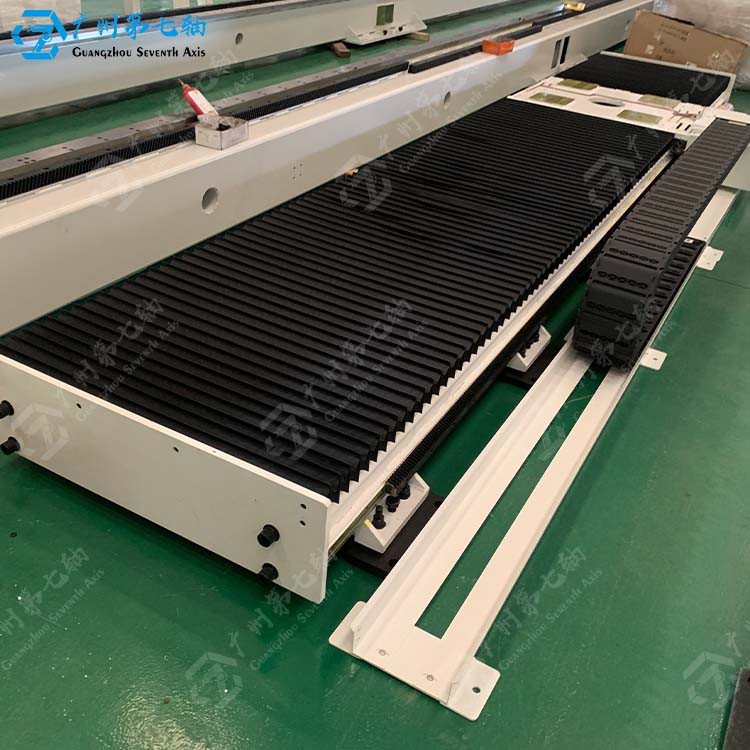
机器人地轨使用电机驱动,整体刚性强,工作范围大,具有结构紧凑、定位精度高、响应速度快、运行平稳等特点。机器人地轨在行走轴导轨上安装一台工业机器人,可以实现产品的上下料、码垛、搬运、焊接、喷涂、铸造等工作,节约人工成本,生产的产品统一性好,大幅降低不合格率,实现工厂自动化生产线的实际需要。
机器人地轨又称机器人外部轴、行走轴、第七轴,是能够满足工业机器人在多个工位间移动作业的行走机构,轨道基座采用高强度型钢与钢板焊接而成,大限度地保障其精度,有效避免变形和振动的情况出现。
机器人地轨的结构设计优化,在日常维护时更加简单,既可以节省维护费用,也可提高维护效率,而且机器人第七轴的维修维护频率也相对较低。