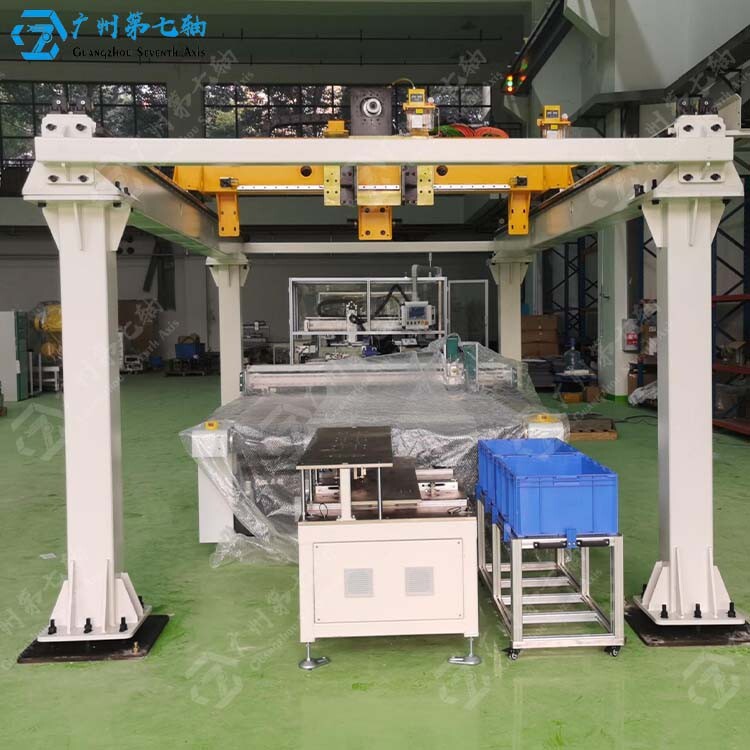
品牌广州第七轴Z轴末端负载50-2900kg重复定位精度±0.1mm
桁架式机械手是一种专为自动化生产线设计的灵活的物料搬运设备。它主要由坚固的桁架结构作为支撑框架,配合精密的机械臂系统,在三维空间内实现、快速的移动和定位。这种机械手通过的驱动系统(如伺服电机)提供动力,确保运动的平稳性和准确性。

桁架式机械手的末端执行器,即夹手,是实现工件抓取、放置、装配等作业的关键部件。常见的夹手类型有抱夹式、吸盘式、叉托式、吊钩式等多种方式,可根据具体任务需求进行选择。

驱动系统为桁架式机械手提供动力,包括电机、传动装置等。电机通过传动装置驱动各轴进行运动,实现机械手的自由运动。常见的驱动方式有液压、气压、机械驱动等。

传感器系统为桁架式机械手提供实时反馈信息,包括位置传感器、力传感器和视觉传感器等。这些传感器可以实时检测机械手的位置、力量和环境信息,并将这些信息反馈给控制系统,以便进行调整。

桁架式机械手能够实现工件从一个工位到另一个工位的全自动化搬运,无需人工干预,从而大大提高了生产线的连续性和自动化水平。这种自动化的搬运方式减少了人工操作的等待时间,使得生产线能够更地运行。
通过程序控制,桁架式机械手可以在加工过程中避免因人为操作失误而引起的事故,提高了生产的安全性。这有助于减少工伤事故的发生,降低企业的安全风险和经济损失。