嘉兴莫派克集成式吸具现货直发机器人吸盘
-
面议
及时发货
交易保障
卖家承担邮费
真空吊具由真空转移体系,真空自动抓放体系,真空夹具和一切其他的真空转移配件组成。其利用真空原理吸附物体进而平衡物体的重力。使操作人员在根本感觉不到物体重力的状况下,轻松完结物体的转移、翻转、装配等工序。真空吊具操作简略、运作省力、安全。因而,在汽车、家电、包装等转移频繁的行业中运用十分广泛!
吸盘的工作原理?
吸附:吸盘与工件表面接触后,机械手通过连接的真空泵或压缩空气源在吸盘内部创建真空或气压差。这导致吸盘与工件之间的压力差,将工件牢固地吸附在吸盘上。
密封:吸盘材料通常非常柔软,能够适应工件表面的形状,并在吸附时形成密封,以确保吸盘与工件之间的真空或气压差得以维持。
释放:当需要移动或释放工件时,机械手可以切断真空或气压差,使吸盘失去吸附力,从而允许工件被轻松地移动、放置或处理。
根据吸附物的形状,材质选择吸盘形状。
平形吸盘,适用一般吸附物(吸附物表面平整,变形小的物体)。
深形吸盘,用于球形吸附物。
皱褶形或叫风琴形吸盘,适合需缓冲功能但安装尺寸不适合其他缓冲机构的场合,还有是吸附物表面为斜面时。
椭圆形吸盘,应用于长方形的吸附物。
海绵型吸盘,应用于表面凹凸不平的吸附物。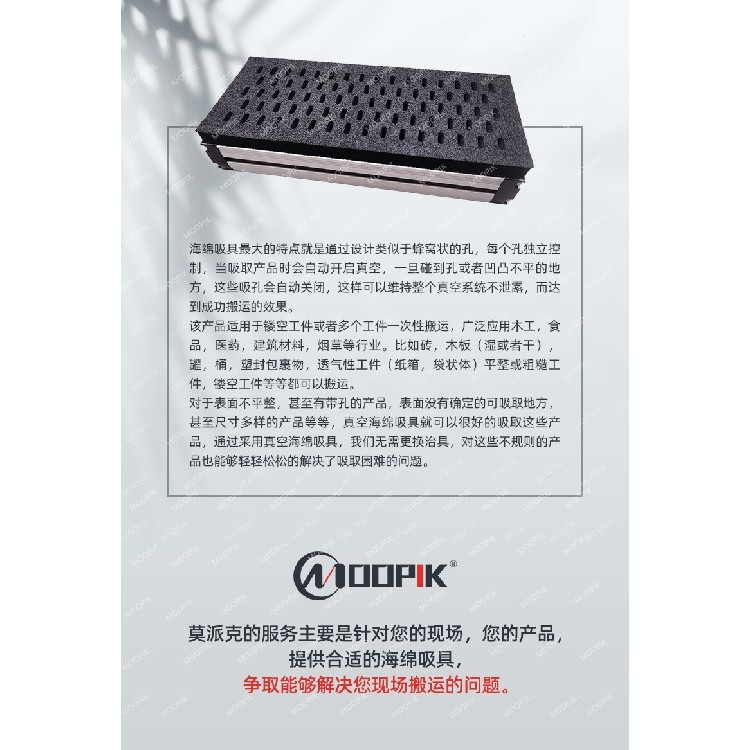
当吸盘底座上的气路被连接到真空泵时,空气就会从吸盘底部的吸孔中流入气路,并通过气管、电磁阀、气缸等元件的协调控制,完成吸和放的过程。在吸进空气后,气路会关闭,形成真空状态,使吸盘的表面和被吸物体之间的压力产生差异,从而使吸盘与被吸物体之间产生吸力。当需要放开被吸物体时,气路中的压缩空气可以通过气缸送入吸盘底座,用压缩空气打破真空吸盘与被吸物体之间的吸附力,完成放操作。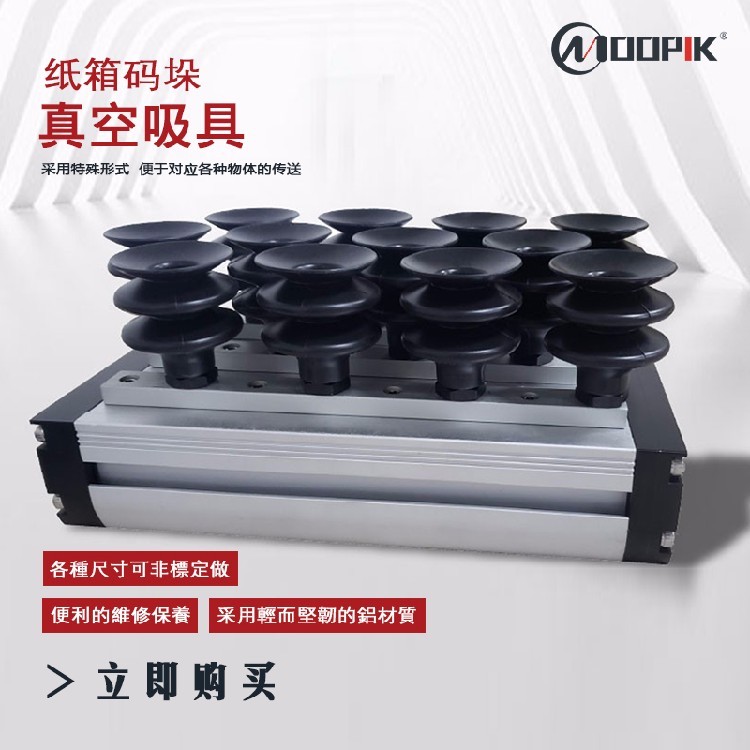
机器人电动吸盘
简介:在实际生产中,锻压机械都需要频繁搬运工件。对于多工位压力机来说,快速换模系统的送料装置上配有端拾器,也叫电动吸盘,在移动过程中,可以进行移动。
工作原理:通过吸盘吸附在工件表面、由高柔性夹具搬运工件,通过接近传感器、可编程逻辑控制器等形成了工件的自动化端拾和运送系统,了多工位压力机正常工作时的端拾和冲压速度。
优点:具备体积小、传动、高刚性、耐过载的特点,同时,由于间隙、旋转振动、惯性小,所以具有良好的加速性能,可实现平稳运转并到达较高的精度。
真空吸盘,又称真空吊具,是真空设备执行器之一,一般来说,利用真空吸盘抓取制品是廉价的一种方法。
工作原理:将真空吸盘通过接管与真空设备接通,然后与待提升物如玻璃、纸张等接触,启动真空设备抽吸,使吸盘内产生负气压,从而将待提升物吸牢,即可开始搬送待提升物。
应用范围:应用于各种真空吸持设备上,如在建筑、造纸工业及印刷、玻璃等行业,实现吸持与搬送玻璃、纸张等薄而轻物品的任务。