近年来,国内晶圆升降机构的发展也很迅速。一些较早投入应用的晶圆传输机构。前端支持品圆机械手爪随滑块在导轨内上下运动,由直流电机驱动,该机构升降行程较小、精度低,速度慢,缺少晶圆保护装置。另外交接晶圆过程中,吸附系统使晶圆中间变形,定位精度低,开环控制易造成晶圆窜动和损坏,同时对驱动电机造成冲击。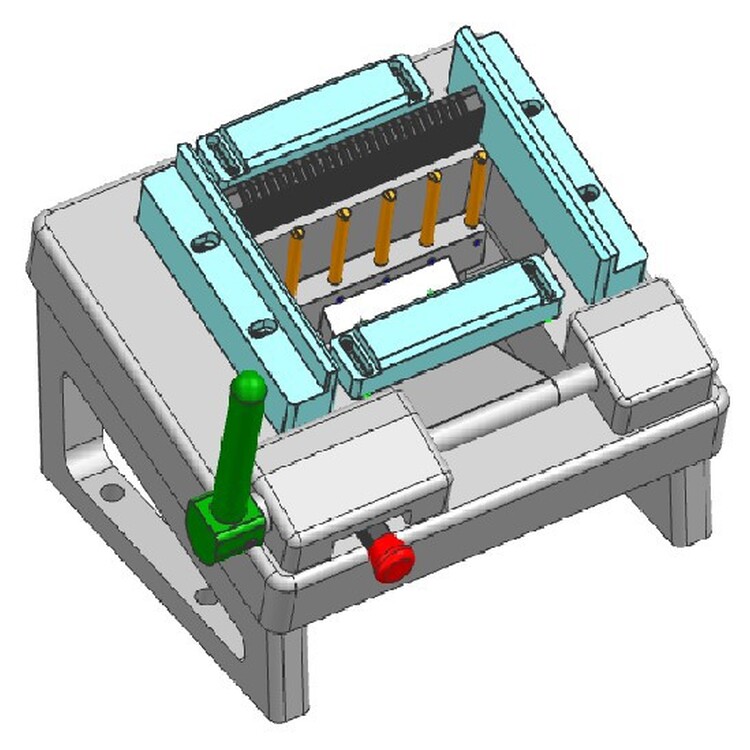
电机驱动滑块沿导轨导向运动,检测单元反馈位置信号控制机构运动,真空吸附单元与导轨滑块用连接块连接,跟随滑块运动运载晶圆,其上加装缓冲装置单元,使吸管与晶圆、晶圆与上下臂和吸盘接触过程中防止吸附的晶圆产生变形甚至破损,以及减小对电机的冲击。
晶圆升降机构需要完成升降运动,采用直线电机驱动。直线电机是一种将电能直接转换成直线运动,而不需要通过任何中间转换机构的新颖电机。其代表是音圈电机,音圈的绕制方向与磁场方向垂直,具有喇叭状的辐射磁场,音圈通电后在磁场中会产生力,力的大小与施加在线圈上的电流成比例。电机运动形式可以为直线或者圆弧,主要用在精密仪器上。
升降机构运动部件是整个机构的核心部件,完成升降运动是传输系统对机构的核心要求。通过的检测装置测量运动部件的位置,反映其运动速度、时间以及重要的定位情况。升降机构的定位精度直接影响晶圆到达工件台上的精度。
位移是物体在运动过程中位置变化,它与移动量有关。小位移通常用应变式、涡流式、差动变压器式、电感式、霍尔传感器来检测,大位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。本文采用测量直线位移量的传感器,具体有电感式位移传感器、电容式位移传感器、光电式位移传感器、超声波位移传感器、霍尔式位移传感器。
晶圆升降机构中的真空吸附系统是用来吸附和释放品圆,从而进行晶圆的检测和传输,以便实现传输的。机构要求晶圆定位精度高,真空吸附系统在吸附和释放晶圆过程中尽量减小冲击,要求吸附的时候应当缓慢地增加或减小真空压力,使得压力变化为斜坡变化,大限度减小晶圆在真空吸附下精度的损失。
晶圆升降装置,包括静电卡盘及位于静电卡盘下方的多个升降组件,静电卡盘上放置有一晶圆,每个升降组件均包括驱动单元、位移监测单元及顶针,驱动单元与顶针连接并驱动顶针上升或下降以顶起或远离晶圆,位移监测单元位于驱动单元上,并用于监测顶针上升或下降的高度并反馈给驱动单元。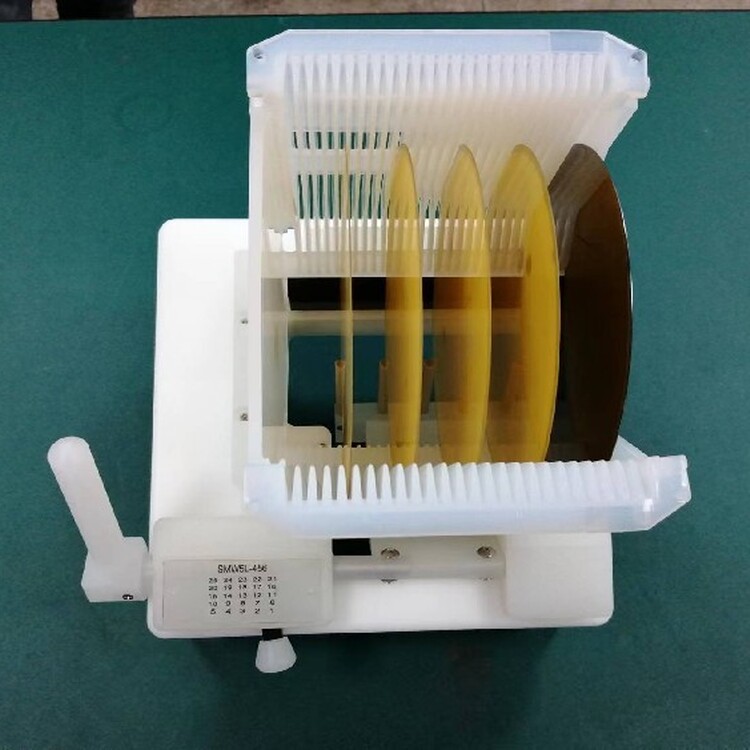
集成电路行业发展迅速,对芯片产品的良率要求日益增高,晶圆测试能够在芯片未进行切割、引线、封装等多重后道工序加工前进行测试,减少不良品在后续加工中的严重浪费,所以急需晶圆测试设备达到高速、、高稳定性的要求。晶圆测试设备达到高速、、高稳定性的要求关键在于升降机构。目前晶圆测试装备采用的升降机构顶升力较小,顶升稳定性较差,精度低,而且有些顶升机构结构复杂,制造成本尚。
有些机器具有缓冲存放系统,使工艺过程总可以有新的晶圆准备被加工(或给图形化设备的放大掩模版),从而使机器的效率大化。这些称为储料器。操作员将片匣放在机器的上载器上,按下开始键,然后的工艺过程就交给机器来做。在300mm晶圆的水平,片匣可能会被一个单的晶圆承载器或输运器所替代。