BORUNTE工业机械臂维修保养方案解锁
-
≥5台¥456.00
-
3-5台¥456.00
-
1-3台¥486.00
及时发货
交易保障
卖家承担邮费
BORUNTE工业机械臂维修保养方案解锁
有安装到我方机器人上测试,确实送到客户方能正常使用,避免无法测试返修给客户带来设备测试风险和停机损失,保修承诺:对维修的库卡KSP600-3X20产品,公司提供数月的免费保修服务,KUKA机器人维修KUKA机器人维修>KUKA安全逻辑电路板ESC-C1V1.20/维修产品编:ProKUKA机器人维修。作为一家维修及保养工业机器人的公司,维修检测设备,不限品牌及型号,高度化。我们的技术师傅有着丰富经验和维修资格,能为客户解决各种现场疑难问题,周边地区还提供上门服务,更有负责同事一对一咨询。
江苏酷卡MFC1多功能板卡维修,浙江库卡MFC3多功能板卡销售,四川库卡MFC1多功能板卡销售,贵州KUKAMFC2多功能板卡维修,山东机器人安全板维修,湖南机械手电源分配板维修销售,湖北机器人控制基板维修销售。用该中间回路电压为内部驱动调节器和外部驱动装置供电。有4个结构尺寸相同的不同设备类型。KPP不带轴伺服系统(KPP600-20)KPP带单轴伺服系统(KPP600-20-1x40),输出端峰值电流1x40AKPP带双轴伺服系统(KPP600-20-2x40),输出端峰值电流2x40AKPP带单轴伺服系统(KPP600-20-1x64),输出端峰值电流1x64A库卡机器人KPP600驱动电源维修广州安川机电科技有限公司服务流程为:A、待修品寄(送)到安川→人员检测(安全,不会损坏部件)→报价→客户同意检修→修复→寄回;B、待修品寄(送)到安川→不同意→不收任何费用我公司原件寄回(只需您承担运费可)。
变量在程序中主要用来保存计数值,运算值和输入信号等,按照其保存的数据种类及性质不同大致可分为下列6个种类:根据控制柜型号不同,默认的变量数量可能有所不同,在使用时请不要超出默认数量,注意点:保存于变量中的数据会一直保存。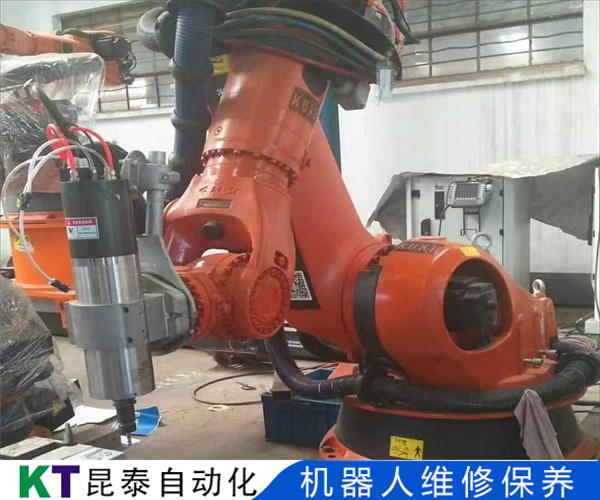
关机重启即可使用变更后的变量啦,文末哲思没有经历凤凰涅槃的火浴之痛,哪有日后一飞冲天的羽化重生,由安川机器人维修,洁净机器人日产DAIFUKU大福示教编程器主板IBS-3739A|“2020医流行业成长潜力技术装备企业奖项主要表彰2020年期间在服务模式。 我们也可以现场提供维修服务,服务内容产品维修:根据用户需求,对返修的产品进行标准维修和快速维修,PCB电路板维修:对产品中的PCB电路板进行的功能检测和级维修,设备故障调查:根据设备损坏程度和故障情况。
BORUNTE工业机械臂维修保养方案解锁
1、故障识别:,需要确定机器人的具体故障。这可能涉及到观察机器人的行为,查看是否有任何异常的指示灯或错误信息,或者检查机器人的日志文件以获取更多信息。
2、初步检查:在确定了故障之后,需要进行初步的检查。这可能包括检查机器人的电源和电线,查看是否有明显的物理损坏,或者检查机器人的软件和硬件。
3、诊断测试:如果初步检查无法确定问题所在,那么可能需要进行更深入的诊断测试。这可能涉及到运行特定的测试程序,以检查机器人的各个部分是否正常工作。
4、题:在进行了诊断测试之后,应该能够到问题的具体位置。这可能是一个硬件故障,比如电机或传感器损坏,也可能是一个软件问题,比如程序错误或配置问题。
5、维修或更换:一旦到问题,就可以进行维修或更换部件。如果是硬件故障,可能需要更换损坏的部件。如果是软件问题,可能需要修复程序错误或重新配置。
6、测试验证:在维修或更换部件之后,需要进行测试以验证问题是否已解决。这可能涉及到运行之前出问题的任务或程序,以确保机器人现在能够正常工作。
应考虑车架零件在夹具上如何进行,为了降低焊接夹具的高度,降低夹具的制造难度,需将车架作适当旋转,例如,设计摩托车车架车头组焊夹具时,有两种旋转方式:将车架立管旋转到与水平面垂直,将车头部件整体旋转到与水平面平行。而支撑架与零件工装是一个整体,故焊丝与零件接触构成信号回路,导致故障发生,更换送丝软管并做好绝缘后,设备故障消除,如图2所示。(2)FANUCM—10i弧焊机器人程序在进行寻位动作时出现报警,报警号为:THSR-022工件未零点标定。考虑该焊接程序是次进行示教并试运行,应该与编程参数有关,查阅报警对策要求进行零件调校;另外由于报警号为THSR,于是考虑检查碰触相关的参数。DATA——碰触设定,然后找到寻位使用的参数号并将原点的值改为开,接着再次对该进行寻位示教,后关闭原点,试运行程序未发生报警。3.外部紧急停止线路故障外部紧急停止线路故障,该类故障报警号一般与SRVO相关,但其主要原因是由于紧急停止线路被触发导致设备故障。
对于波纹管管线包CPP,因外护套是塑料件,对于管线状态良好的情况下管线包的损坏大多集中在摩擦球,波纹管上,使用和维护简单,但需要定期检查,SDP因内部绞线的特殊要求,需要设备维护工程师按照上海发那科所提供的<管线包使用保养手册>仔细了解管线的安装方法。其重量减至仅25kg,结构设计紧凑,几乎可安装在任何地方,比如工作站内部,机械设备上方,或生产线上其他机器人的旁。用途广泛IRB120广泛适用于电子、食品饮料、研究等领域,进一步增强了ABB新型第四代机器人家族的实力。这款6轴机器人高荷重3kg(手腕(五轴)垂直向下时为4kg),工作范围达580mm,能通过柔性(非刚性)自动化解决方案执行一系列作业。IRB120是实现高成本效益生产的之选,在有限的生产空间其优势尤为明显。易于集成IRB120仅重25kg,出色的便携性与集成性,使其成为同类产品中的。该机器人的安装角度不受任何限制。机身表面光洁,便于清洗;空气管线与用户信号线缆从底脚至手腕全部嵌入机身内部。
资源整合后能以有效的速度和方法为进口示教器维修,示教盒维修,教导盒维修提供质的服务,安川首钢机器人示教盒维修是广州安川机电科技有限公司现在主营服务之一,安川YASKAWA机器人首钢Motoman莫托曼示教器维修:如ERC示教盒维修。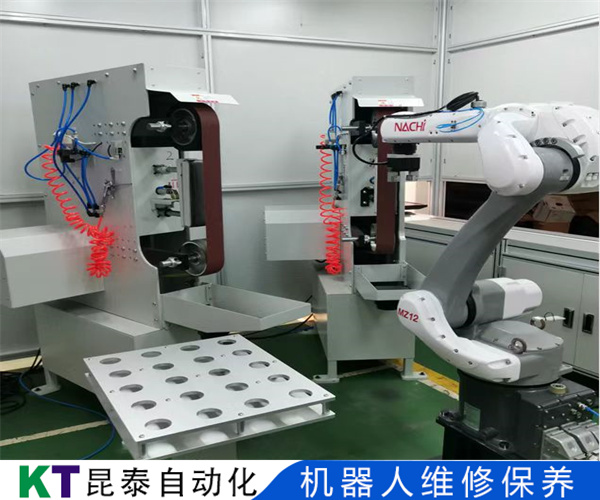
BORUNTE工业机械臂维修保养方案解锁
1、需要确定跳闸的具体原因,然后采取相应的处理措施。可能的原因包括负载过大、电源问题、软件故障、电路短路等。
2、如果跳闸是由于负载过大引起的,可以考虑减少机器人的负载,尽量避免在负载高峰期使用机器人。此外,也可以考虑升级机器人的硬件设备,提升其负载承受能力。
3、如果跳闸是由于电源问题引起的,需要检查电源线路是否松动或损坏,并尝试更换电源适配器或使用稳定的电源。如果问题仍然存在,可能需要联系售后服务人员进行检修。
4、如果跳闸是由于软件故障或电路短路引起的,可以尝试重启机器人,看是否能够解决问题。如果问题仍然存在,可能需要升级或重新安装机器人的软件,或者联系人士进行检修或更换相关电路部件。
经查,发现正负电源双绞线的一端插头长期埋在积水中,线路已腐蚀严重。更换线路后复位,对机械手进行全轴零点复归“ZEROPOSTTTIONMASTER,导入备份程序后恢复正常,故障排除。例2FANUCR-2000iB/210F点焊机械手在生产辆白车身时,出现所有的焊点整体偏移,后续生产情况类似,无任何故障报警。根据故障现象,大致可以排除伺服部分故障,故障可能原因:机械手本体或机械手焊钳机械变形或偏移。按照维修经验,先检查机械手本体及机械手焊钳机械部分,未发现异常。人为篡改PNS0010程序或导入错误的PNS0010程序。通过机械手示教器查看PNS0010程序的修改,发现PNS0010程序未被修改。 然后添加抽检单元,Tags:STK改造»液晶产业设备改造muRata村田STK伺服放大器常规化替换|广科智能工程队在给muRata村田STK自动化仓储系统的伺服放大器改造,把特规品替换成MITSUBISHI三菱MR-J2伺服放大器常规品。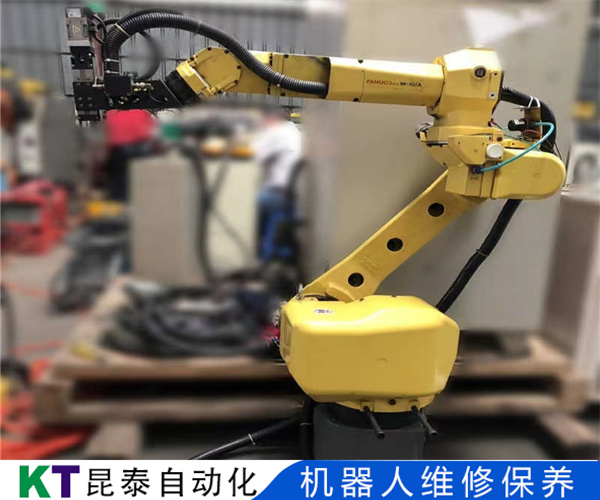
其故障代码的含义是安全设备0至4通道5个安全节点错误,机器人无法正常投入运行。库卡KR机器人维修安全节点主板错误故障维修排查对库卡机器人维修现场的外部安全回路是否有断线或对地短路现象进行检查,经排查确定是因为机器人本身原因导致报警的发生,采用替换法更换控制柜内部安全电路模块,更换同型号安全板后,故障排除,从而确定报警是由于安全板电路损坏导致。飞克机器人维修(东莞)有限公司(faykrr)能够高质的提供库卡机器人控制柜维修,库卡机器人示教器维修,库卡机器人I/O板维修,库卡机器人驱动器维修,库卡机器人伺服电机维修,库卡机器人计算机板维修,库卡机器人电源板维修,库卡机器人安全板维修库卡KR机器人维修安全节点主板错误故障维修用电阻法测量安全信号IO端相关元器件。 机械运动异常快速(飞车)3.主轴不能定向移动或定向移动不到位4.出现NC错误报警5.伺服系统报警6.编码器报警7.电机卡死等,4.库卡机器人PC电脑,工业电脑,工控主机常见故障现象有:开不了机,上电后不工作。
模具,液压,电子,半导体,光学,传感器和测量技术及金属加工工业的发展,更多的数控加工设备投入到生产加工的行业中来,所以一场真正的工业现已到来,伺服维修,伺服驱动器维修具实力的维修站机器人伺服电机维修包括KUKA库卡机器人伺服电机维修。
TgEfOguVtKf