徐州供应晶圆扶梯多少钱一个
-
面议
及时发货
交易保障
卖家承担邮费
晶圆升降机构隶属于晶圆自动传输系统,主要承担着与晶圆装卸机械手配合完成晶圆在加工工件台与预对准设备、晶圆盒之间交接的工作。大尺寸的晶圆重量增加,更易变形破损,Z 轴方向上的定位(重复定位)精度直接影响晶圆在过渡过程中平稳安全性;同时要考虑到结构紧凑、洁净化、低散热对环境影响尽量小。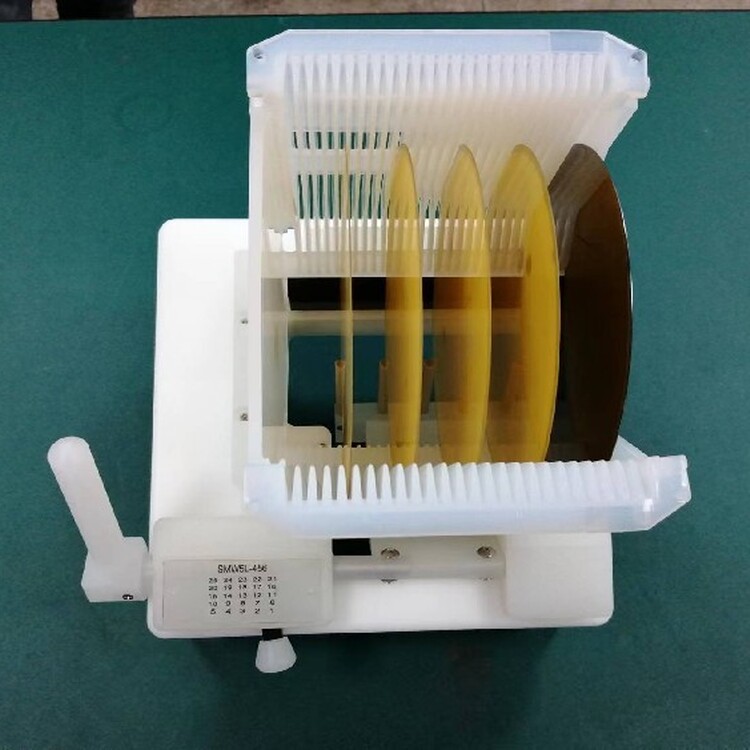
晶圆中200mm 阶段,采用晶圆输送机代替人手操作,排除人为带入的环境污染。随着IC 制造工艺的发展和对环境洁净度要求的提高,国外机器人研究机构在上世纪 80 年代开展了晶圆自动传输系统各部分的关键技术研究,研制出直接驱动电机、位移传感器等关键部件。
电机驱动滑块沿导轨导向运动,检测单元反馈位置信号控制机构运动,真空吸附单元与导轨滑块用连接块连接,跟随滑块运动运载晶圆,其上加装缓冲装置单元,使吸管与晶圆、晶圆与上下臂和吸盘接触过程中防止吸附的晶圆产生变形甚至破损,以及减小对电机的冲击。
位移是物体在运动过程中位置变化,它与移动量有关。小位移通常用应变式、涡流式、差动变压器式、电感式、霍尔传感器来检测,大位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。本文采用测量直线位移量的传感器,具体有电感式位移传感器、电容式位移传感器、光电式位移传感器、超声波位移传感器、霍尔式位移传感器。
晶圆升降机构是自动控制的,通过音圈电机完成升降运动。如果电机失控此时机构正处于升降运动中,运动部件会上升到高点停不下来顶住外部结构过长时间从而损坏电机。为了避免以上问题,在机构中增加保护措施,确保机构运行的安全性。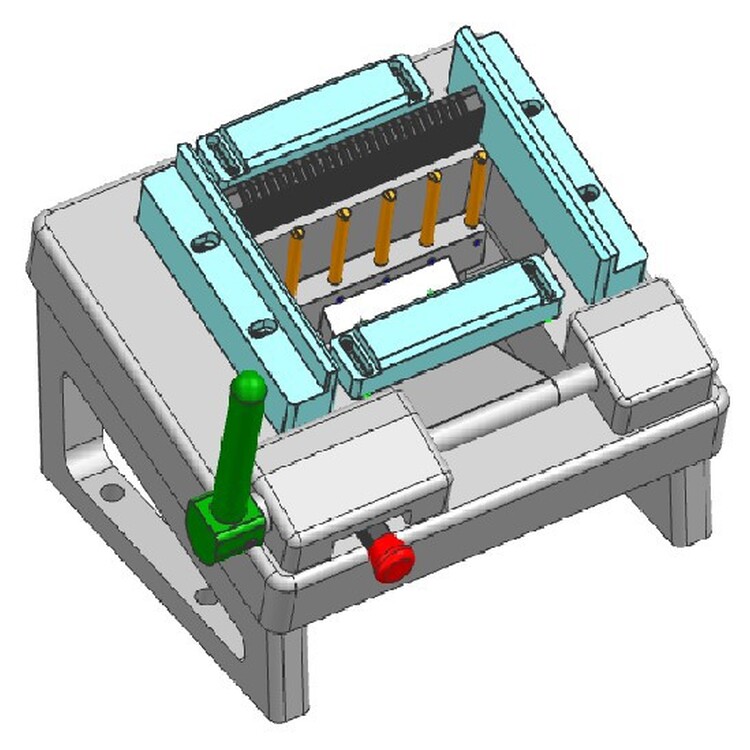
晶圆上表面有定位用的标识,晶圆在预对准阶段确定好了与传输机械手的相对位置,经过升降机构到达工件台吸盘上,为了检测标识位需要其与吸盘相对位置是固定的。因此要求升降机构在圆周方向上不存在转动。同时光栅传感器安装要求光栅尺与读数头相对位置在+0.1mm。防转装置能机构运动圆周方向相对位置,晶圆传输的精度。
目前,半导体制程设备中,常常需要用电机通过传动带带动滚珠丝杆,来控制晶圆的升降。而传动带通过摩擦来传递动力,因此传动带要调整张紧力以获得合适的摩擦力。通过调整传动带的张紧度可以调整传动带和齿轮之间的摩擦力,传动带的张紧度可通过调节电机位置进行调整。另外传动带过紧会使传动带磨损严重,过松则易产生打滑现象,使传动带严重磨损甚至烧坏。
晶圆测试用升降机构,包括底座、托板,其特征是,底座上固定连接有若干个升降滑轨座,托板可升降连接在升降滑轨座上,底座上可滑动连接支撑座,支撑座设置在托板下方,支撑座上固定连接有丝杆螺母,底座上安装有驱动电机,驱动电机输出轴传动连接丝杆,丝杆与丝杆螺母配合连接,支撑座上设有斜块,斜块上端面为倾斜平面;托板上安装有滚轮,滚轮抵接在斜块上端面上,托板和底座之间安装有托板位移测量用光栅尺,驱动电机电连接编码器,光栅尺电连接编码器。
有些机器具有缓冲存放系统,使工艺过程总可以有新的晶圆准备被加工(或给图形化设备的放大掩模版),从而使机器的效率大化。这些称为储料器。操作员将片匣放在机器的上载器上,按下开始键,然后的工艺过程就交给机器来做。在300mm晶圆的水平,片匣可能会被一个单的晶圆承载器或输运器所替代。