派克Parker伺服电机抖动维修窜动现象
-
≥3台¥384.00
-
2-3台¥384.00
-
1-2台¥485.00
及时发货
交易保障
卖家承担邮费
派克Parker伺服电机抖动维修窜动现象 竖线,竖带,花屏,摔破等(更换液晶屏)(4)Kawasaki川崎机器人示教盒按键不良或不灵(更换按键面板)(5)Kawasaki操控盒有显示无背光(更换高压板)(6)川崎示教盒操纵杆XYZ轴不良或不灵(更换操纵杆)(7)Kawasaki川崎教导盒急停按键失效或不灵(更换急停按键)(8)川崎Kawas。
凌坤自动化以技术实力为依托,建有商务部、业务部、技术部、售后部,经过多年耕耘,凌坤自动化实现了跨越式发展,得到了各大企业的普遍认可,获得多项殊荣。总公司拥有50几名技术的工程师,技术在行业内都是厉害的。目前有员工七十多名,其中维修工程师50几名,拥有雄厚的维修实力,是值得您信赖的维修公司。 凭着高科技和的测试维修设备、良好的服务保障在消费者心目中竖立了良好的企业形象。
竖线,竖带,花屏,摔破等(方法:建议更换液晶屏)安川教盒按键不良或不灵维修(方法:建议更换按键面板)安川示教盒有显示无背光维修(方法:方法更换高压板)安川示教编程器数据线不能通讯或不能通电,内部有断线等维修。 KUKA伺服电机维修常见故障:库卡机器人伺服电机磁铁维修爆缸破碎掉(轴承)卡死转不动,伺服电机线圈维修漏电烧过流过压发热发烫启动就报警跳闸,KUKA1FK7101-5AZ91-1ZZQ-Z伺服马达不准原点错乱跑偏位输出不衡维修,伺服电机编码器维修玻璃盘破碎掉磨损,KUKA1FK7101-5AZ91-。 欧姆龙机器人维修,Kuka机器人常见问题及解决方案1开机坐标系无效坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在坐标系中移动。
派克Parker伺服电机抖动维修窜动现象
1.如果未知伺服电机的正确对齐数据,则在拆卸电机之前收集该数据,以便在组装过程中正确地重新对齐。
2.拆卸电机后,再次将编码器对齐,以使其与转子上的磁铁和定子绕组正确对齐。
3.如果更换了编码器,则调整组件。
4.换向的动态对准(在旋转时设定)是通过在正向方向上反向驱动电机并使用示波器将定子/转子的产生电压输出与相应的换向通道进行比较来实现的。
5.示波器从线到线的定子电压轨迹以及来自相应霍尔开关的方波波形代表一相到相电压和一个转子位置反馈信号。
6.大多数单元将具有三个位置反馈信号,这些信号将匹配多达三个线对线电压输出。
7.当反馈输出与其电压输出正确匹配时,调整一组输出也将调整其余两个。
以改变相序;C.修改伺服电机参数No45,改变其脉冲输出信号的相序。7.在我们研制的一台检测设备中。发现松下交流伺服系统对我们的检测装置有一些干扰,一般应采取什么方法来消除?由于交流伺服电机采用了逆变器原理,所以它在控制、检测系统中是一个较为的干扰源,为了减弱或消除伺服电机对其它电子设备的干扰。一般可以采用以下办法:A.伺服电机和电机的接地端应可靠地接地;B.伺服电机的电源输入端加变压器和滤波器;C.所有控制信号和检测信号线使用线。干扰问题在电子技术中是一个很棘手的难题,没有固定的方法可以有效地排除它,通常凭经验和试验来寻找抗干扰的措施。8.伺服电机为什么不会丢步?伺服电机伺服电机接收电机编码器的反馈信号。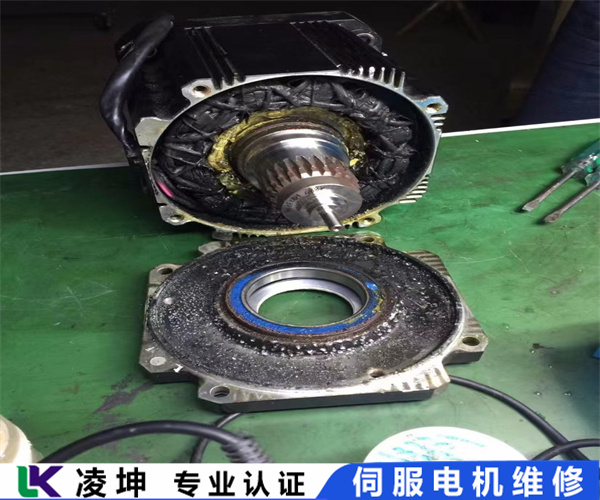
派克Parker伺服电机抖动维修窜动现象
凌坤自动化技术人员使用制造商软件,并将编码器对准工厂规格。编码器因品牌而异。它们也非常脆弱,可能有些挑剔。成功对准后,使用型号特定的驱动器或放大器对伺服电机进行2-3小时的运行测试。如果没有适当的重新对准,交流伺服电机将无法工作。
分直标法,色标法和数标法3种,电容维修的基本单位用法拉(F)表示,其它单位还有:毫法(mF),微法(uF),纳法(nF),皮法(pF),其中:1法拉=103毫法=106微法=109纳法=1012皮法容量大的电容维修其容量值在电容维修上直接标明。 交货迅速,所有维修伺服电机经负载试验,质量,电路板级维修价格实惠,速度快,设备维修之后提供三个月的质保期,在深圳地区的客户,我们可以上门服务,提供上门安装/调试/维修服务,川崎机器人报警代码P0150维修电机失速(1)故障原因:速度反馈的极性搞错。 若各引脚的内部等效电阻R内与标准值相符,说明这块集成块是好的,反之若与标准值相差过大,说明集成块内部损坏,测量时有一点注意,由于集成块内部有大量的三极管,二极管等非线性元件,在测量中单测得一个阻值还不能判断其好坏。 若出现以下几种声音则为不正常现象,(1)轴承运转时有"吱吱"声,这是金属摩擦声,一般为轴承缺油所致,应拆开轴承加注适量润滑脂,(2)若出现"唧哩"声,这是滚珠转动时发出的声音,一般为润滑脂干涸或缺油引起。
派克Parker伺服电机抖动维修窜动现象故障代码:C0201,故障描述:"无效的参数,当切换到操作模式P4时,内部的参数被检测,有参数超出它定义的范围时就出现该报警.对策:查看S-0-0022参数,该参数包含所有的无效参数,再更改无效参数(02,03版固化软件)(2)查看S-0-0423参数,该参数包含所有的无效参数。再更改无效参数(04版固化软件)通常加载基本参数后,导入备份参数可以解决此问题,故障代码:E8260,故障描述:扭矩过载,对策:减小加速度,增大相应的限制值S-00082,S-0-0083,S-0-0092,P-0-109,优化速度环参数,增加外接制动电阻伺服电机内部电压检测电路异常、伺服电机主电路异常。通用伺服电机电压输入范围在320V~460V。 kjgsegferser