KR30-3F库卡KUKA机器人维修保养小技巧
-
≥3台¥358.00
-
2-3台¥358.00
-
1-2台¥498.00
及时发货
交易保障
卖家承担邮费
使其正常运行,并根据需要更换零件,我应该为工业机器人维护预算多少,初制定机器人维护预算可能很困难,遵守制造商建议的维护计划,并随时注意成本,一些任务,例如拧紧松动的配件,将不需要任何成本,而涉及人员的更密集的维护任务将需要更高的成本。
KR30-3F库卡KUKA机器人维修保养小技巧库卡机器人的C1、、KSD驱动器、KSP电源、ESC电路板、KPS-27电源、RDC板、RDC编码器、SID安全回路板、CCU控制板等等都是可以维修的,凌坤自动化旗下有30多位的技术人员可以提供故障检测和技术维修服务。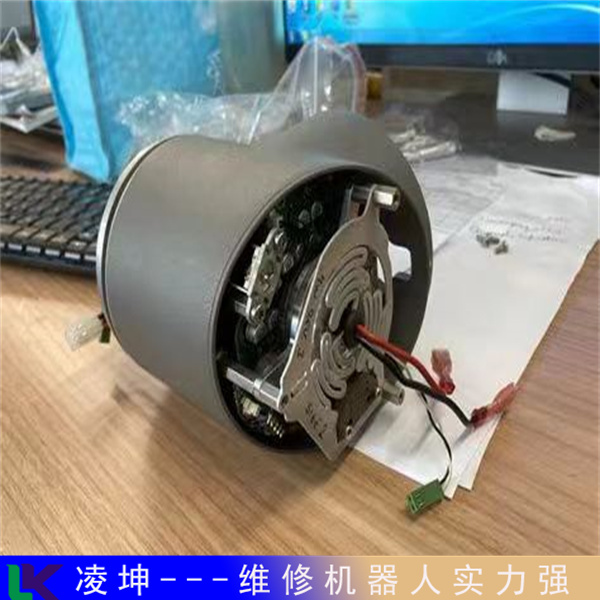
满足仓库需求的工业机器人工具:为了处理各种尺寸和形状的产品,仓库配送中心的工业机器人需要极其灵活的臂端工具,工业机器人夹持器技术的进步使工业机器人能够适应不同包装材料和产品尺寸的混合,这允许工业机器人装载和卸载混合的SKU托盘。
还有多种安装方式可用于在生产布局中提供高的灵活性(桌面、机架安装和垂直安装)。通用性和可扩展性ABB的OmniCore还具有通用性和可扩展性,因为它配备了不同的产品,例如现场总线协议、视觉解决方案和力控制。更短和更快的产品周期意味着人们需要更紧密、更零散地处理生产流程。每次有人靠时关闭工业机器人是没有效率的。ABB的新控制器已为SafeMove2做好了充分准备,SafeMove2是一种软件解决方案,可将工业机器人转变为协作工业机器人,确保人员安全和工业机器人工作效率。新控制器中还内置了ABBAbility数字台、ABBAbilityConnectedServices和RobotWare7,强大和直观的操作系统。
KR30-3F库卡KUKA机器人维修保养小技巧
机器人上电不动作原因
1、电源不稳定:电源电压波动或不稳定,可能导致工业机器人无法正常工作。
2、电源线路故障:电源线路损坏、老化或连接不良,导致无法为工业机器人提供稳定的电源。
3、电源适配器问题:电源适配器损坏或故障,无法将输入电源转换为工业机器人所需的电压和电流。
4、工业机器人的主控制器出现故障,无法接收或处理指令。电路板上的元器件损坏或短路,导致电路无法正常工作。
5、传感器损坏或无法正常工作,导致工业机器人无法感知环境或执行指令。电机损坏或无法正常工作,导致工业机器人无法移动或执行动作。
6、工业机器人操作环境存在电磁干扰,影响机器人的正常工作。工业机器人与其他设备或系统之间的通信故障,导致无法接收或发送指令。
工业机器人经过特殊密封和接地,以防止在运行过程中产生静电,工业机器人还使用对静电荷不导电的特殊材料制成,这些费用可能会损坏计算机部件,手机部件和其他电子产品,Motoman推出用于工业机器人教育的新STEM平台与许多其他主要工业机器人制造商一样。
而且还减少了工人在冗长、枯燥的材料处理中有时可能会出现的错误职位。KUKA工业机器人视觉系统确保正确的零件到达所有正确的地方,而不必担心出错或将零件发送到错误的地方。这通过在错误发生之前将其消除,从而为公司节省了资金,同时也提高了公司的声誉和利润。发那科弧焊工业机器人帮助填补技能差距在过去的几十年里,随着公司离开该国到其他地方寻找更便宜的生产,制造业作为一种选择的职业已经失宠。这使得许多制造商在需要熟练的弧焊工来执行其工厂所需的工艺时陷入困境。这就是发那科工业机器人弧焊机发挥作用的地方。当制造商于发那科的弧焊工业机器人时,他们的“工人”将全天、每天都在那里,不需要休息、休假或病假。他们不仅能够填补制造商就业市场的空缺。
KR30-3F库卡KUKA机器人维修保养小技巧
机器人上电不动作维修方法
1、检查电源连接:确保电源线已正确连接到工业机器人和电源插座。检查电源插座是否工作正常,可以尝试使用其他电器设备测试插座。
2、检查电源线与插头:观察电源线是否有磨损、裸露或断裂的情况。检查电源插头是否松动或损坏,确保插头紧密连接。
3、检查电源模块:如果机器人内部配备有电源模块,检查模块是否损坏或出现故障。使用万用表等工具测试电源模块的输入和输出电压,确保在正常范围内。
4、检查控制器指示灯:观察控制器的指示灯是否亮起,以判断其是否处于正常工作状态。如果指示灯不亮,可能是控制器故障或电源未正确连接。
5、检查电路板:打开机器人的外壳(如果可能),检查电路板是否有明显的损坏或烧焦痕迹。使用的电子测试工具对电路板进行测试,查找可能的故障点。
6、检查驱动器与电机:确认驱动器是否接收到来自控制器的正确信号。检查电机是否损坏或无法正常工作,可以尝试使用备用电机进行测试。
7、检查传感器:确认机器人的传感器是否损坏或无法正常工作。检查传感器的接线是否松动或损坏,确保连接紧密。
KR30-3F库卡KUKA机器人维修保养小技巧
同时使工业机器人能够执行体力劳动并降低受伤风险。协作工业机器人真正为需要手动工作和自动化相结合的任务提供了完解决方案,在这些任务中,当协作工业机器人处理物理滑行工作时,工人看到、感觉到并根据需要做出反应很重要。这些协作工业机器人非常、用户友好,为替代枯燥和重复性任务提供了的价值,同时还提供了非常好的回报。想知道风冷式和水冷式工业机器人焊枪之间的主要区别是什么?您是否寻求指导以更好地了解您的焊接工艺需求?比这篇文章更适合你!为了获得佳性能和成本,拥有正确的手电筒总是好的,的目标是帮助您到达那个地方。水冷式割炬在水冷式割炬中,冷却溶液通过软管流入并在割炬的主体和易损件中循环,然后返回到吸收热量的冷却器。
称为机器人操纵系统,停留在一个地方,但提供功能,这些设备通常具有多个关节,可以灵活移动以适应狭小空间并执行复杂的任务,您可以将各种工具附加到这些类型的系统,它们还可以与远程检查设备协同工作,以使它们更接近需要去的地方。
工业机器人伺服驱动系统会更好,从长远来看,这些伺服驱动器实际上比传统电机更,具有更好的生命周期,伺服驱动器存在于工业机器人中,但它们也用于其他类型的工厂自动化和CNC加工,的绘画--KUKA绘画工业机器人在准确性方面。
其中包含确定的里程碑和行动项目。在项目开始之前与团队一起审查表和计划,并根据需要进行修改。每个项目团队成员都应该了解他们的具体职责、项目工作流程和表。安全:每个项目都存在安全隐患;完整的现场安全计划对于确保安全结果非常重要。在开始工作之前完成危害评估将确保您的项目以安全的心态进行规划。与您的团队一起审查安全计划将使每个人都保持警觉并安全工作。作为工业机器人行业协会(RIA)认证的集成商,在我们承担的所有项目中都将安全放在。制定安全计划时要牢记的事项:个人防护装备要求(PPE)上锁/挂牌(LOTO)防火和可燃物观察所需的许可证或证书适当的培训:在项目开始之前确定并完成针对项目的培训。如果在规划阶段没有发现。
您可能在日常表现中没有注意到它,但随着的推移,这些压力会累积起来,并在机器人的生命到期之前很久就结束了它,-效率:维护良好的机器也往往运行效率更高,即使您的机器人似乎在没有建议的预防性维护的情况下工作。
a6bhadjlkal