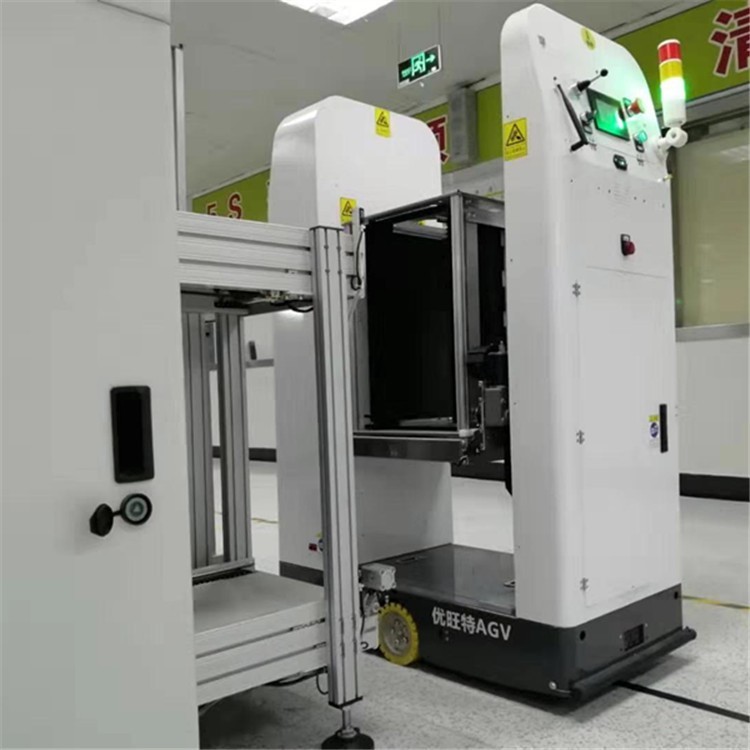
负载重量0-5000KG通信方式串口、WIFI(2.4/5G)驱动方式差速、舵轮、麦轮供电能源锂电池组爬坡性能3-5°安全防护激光避障导航方式磁条、二维码、激光控制方式单片机行驶方式前进后退
1973年,位于瑞典卡尔马市的沃尔沃装配厂着手发展异步设备装配线,来替代传统的传送带式装配线。至此,由计算机控制的装配型AGV数量达到了280辆。

20世纪70年代中期,由于负载AGV的引入,AGV产业得到了次较大的发展。由于这些负载AGV能够为物料处理领域提供多功能的服务而被广泛接受,例如工厂里的工作站台,传送设备,以及控制系统和信息系统之间的连接等。已经有许多厂家制造的几百个负载AGV系统运转着。这些 AGV系统在仓库、工厂、作坊、医院以及其它工商业领域中得到了广泛的运用。

.智能地面和dumb小车
20世纪70年代,基本的导引技术是靠感应埋在地下的导线产生的电磁频率。通过一个叫做“地面控制器”的设备打开或关闭导线中的频率,从而指引AGV沿着预定的路径行驶。由于AGV只是沿着地面上的信号行驶,所以被称为“dumb”,而AGV行驶的路径是由智能的地面控制器决定的,因此,这一时期的系统被称为“智能地面”和“dumb小车”。

随着电子技术和微处理器技术的不断发展,AGV的应用也越发广泛。AGV变得更加智能化,而路径却没有以前那么复杂了。其中,死估算的发展是主要的突破之一。死估算这一术语描述的是AGV自主在地面行驶的能力。死估算的大优点是在交叉点不需要沿着AGV的转弯半径开槽,AGV可以离开导线,按照程序中设定的半径转弯,然后再继续沿着导线行走。这样,虽然在地面上仍然需要埋设多条导线,但是导线的安装却非常简单了。

AGV的应用从初的传统式定向配送,迅猛地发展到拥有机器人接口的、由复杂的计算机控制的汽车装配线领域。AGV能够成为一个立的系统,也可以集成到其它系统中,或者成为各个相对立的自动化生产区之间的纽带。初的AGV只用于在水平方向上搬运放在托盘上的物料,而对于AGV的设计和应用已经像工业机器人一样多种多样了。
充电自动化
当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方“排队”充电。
另外,AGV小车的电池寿命很长(2年以上),并且每充电15分钟可工作4h左右。