发那科机器人控制板卡维修速度快
-
≥5台¥456.00
-
3-5台¥456.00
-
1-3台¥486.00
及时发货
交易保障
卖家承担邮费
发那科机器人控制板卡维修速度快
实在确保接地,伺服参数:伺服增益太大,主张用手动或主动方法从头调整伺服参数,承认速度反应滤波器常数的,初始值为0,可测验增大值,电子齿轮比太大,主张恢复到出厂,伺服体系和机械体系的共振。作为一家维修及保养工业机器人的公司,维修检测设备,不限品牌及型号,高度化。我们的技术师傅有着丰富经验和维修资格,能为客户解决各种现场疑难问题,周边地区还提供上门服务,更有负责同事一对一咨询。
如果是电源不起振或开关管开路引起的故障,则大多数情况下,高压滤波电容两端的电压未泄放掉,此电压有300多伏,如果不小心被阁下玉手摸到,一定让你留下难忘的记忆由于检修电源要接触到220V高压电,一旦接触36V以上的电压就有生命危险。电极磨损的补偿,对机器人焊接质量有着十分重要的影响,今天给小伙伴们带来KUKA机器人标定板补偿设定的方法和程序的介绍及告知KUKA库卡焊接机器人维修补偿方式选择进入workvisual——项目——外部轴设备,进入器—optionpackages—ServoGunTCEditer选项——选择GunOptions中的Burn-offmanagement,有两个选项(百分比Relationin%和标定板IndividualMeasurement),选择标定板如图所示:个电极补偿基准设定个电极补偿基准设定:是为以后换帽、修磨等出现的磨损设定一个补偿基准。原理如下:得出总的磨损量,之后测量动电极的磨损量。
需要考虑达到点位需求,还要考虑管线包的状态,避免管线早损坏,相比,SDP因管线包更加贴服机器人,因此干涉空间小,机器人的各轴允许转角由机器人软件进行限位控制,因此调试时难度小,调试速度快,降低了干涉风险。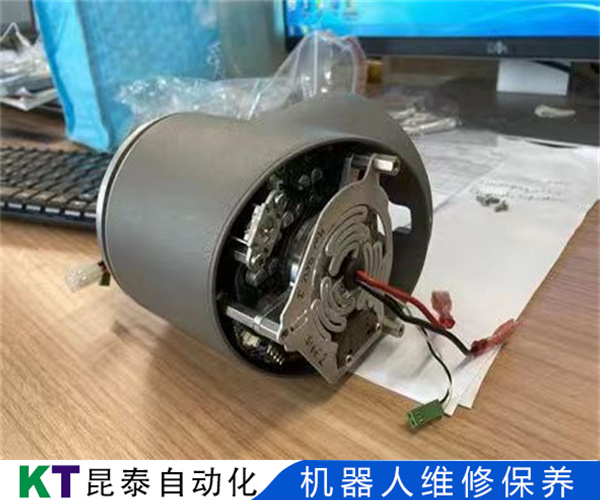
得出的结果保存在数据1上,SUB从数据1中减去数据2,得出的结果保存在数据1上,MUL数据1和数据2相乘,得出的结果保存到数据1里,DIV数据1除数据2,结果保存在数据1里,CNVRT通过数据2的脉冲型的型变数的坐标系。 为您提供直观详细的减速器更换方法--发那科机器人J2轴减速器更换流程图文详解教程,为您提供直观详细的减速器更换方法,1.将J2轴的外壳打开,2.拧开内壳的螺丝(左),将内壳拆下(右),3.用较长的5号内六角。
发那科机器人控制板卡维修速度快
1、故障识别:,需要确定机器人的具体故障。这可能涉及到观察机器人的行为,查看是否有任何异常的指示灯或错误信息,或者检查机器人的日志文件以获取更多信息。
2、初步检查:在确定了故障之后,需要进行初步的检查。这可能包括检查机器人的电源和电线,查看是否有明显的物理损坏,或者检查机器人的软件和硬件。
3、诊断测试:如果初步检查无法确定问题所在,那么可能需要进行更深入的诊断测试。这可能涉及到运行特定的测试程序,以检查机器人的各个部分是否正常工作。
4、题:在进行了诊断测试之后,应该能够到问题的具体位置。这可能是一个硬件故障,比如电机或传感器损坏,也可能是一个软件问题,比如程序错误或配置问题。
5、维修或更换:一旦到问题,就可以进行维修或更换部件。如果是硬件故障,可能需要更换损坏的部件。如果是软件问题,可能需要修复程序错误或重新配置。
6、测试验证:在维修或更换部件之后,需要进行测试以验证问题是否已解决。这可能涉及到运行之前出问题的任务或程序,以确保机器人现在能够正常工作。
ABB装配机器人保养更换1.本体油品更换机器人齿轮箱,平衡缸或连杆油品更换,2.机器人SMB板检查及电池更换检查SMB板的固定连接是否正常,更换电池,ABB装配机器人控制柜标准保养常规检查1.控制柜清洁对机器人控制柜外观清洁。测试各轴电机抱闸功能。保养件更换本体油品更换机器人齿轮箱、衡缸或连杆油品更换。机器人SMB板检查及电池更换检查SMB板的固定连接是否正常,更换电池。更多机器人维修保养咨询请到:篇:电容器的维修保养篇:ABB机器人维修时常见的九大故障ABB机器人维修时常见的九大故障::161返回ABB机器人维修时常见的九大故障在什么情况下需要为机器人进行备份?解析:新机器***次上电后。在做任何修改之前。在完成修改之后。如果机器人重要,定期1周一次。***好在U盘也做备份。太旧的备份定期删除,腾出硬盘空间。机器人维修出现报警提示信息10106维修提醒是什么意思?解析:这个是ABB机器人智能周期保养维护提醒。机器人在开机时进入了系统故障状态应该如何处理?
码垛机器人教导盒维修型号有:KR40PA,KR120PA,KR180PA,KR240PA,KR240PA,KR470-2PA,KR700PA,KR1000L950PA,KR10001300PA等,出处:凌肯自动化伺服驱动器维修,伺服电机维修链接:Show4904.htm伺服驱动器维修伺服电机维修。加急件1-2个工作日就可解决故障,普通件3-5个工作日可修复KUKA机器人维修KUKA机器人维修>MFC2/DSEIBS3.02库卡MFC2多功能板卡维修产品编:ProKUKA机器人维修|产品名称:MFC2/DSEIBS3.02库卡MFC2多功能板卡维修产品编:Pro20产品MFC2/DSEIBS3.02库卡MFC2多功能板卡维修广州安川机电科技有限公司24小时,广州安川机电科技有限公司配备的库卡机器人MFC多功能电路板维修检测以及测试设备,检测库卡MFC板卡各项功能指标,进益求精的做好库卡MFC板卡维修事宜,出仓合格。同时我们提供KUKA库卡机器人MFC板卡销售服务,欢迎来电:广州安川机电科技有限公司从事库卡机器人保养维修以及配件销售服务。
用示教器输入的键信息被传送到主CPU如下图所示,主要原因:1.示教器有问题,2.连接到示教器线束断路,3.主CPU板有问题,对策:1.更换示教器,2.检查示教器的线束,3.更换主CPU板,川崎维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例。
发那科机器人控制板卡维修速度快
1、需要确定跳闸的具体原因,然后采取相应的处理措施。可能的原因包括负载过大、电源问题、软件故障、电路短路等。
2、如果跳闸是由于负载过大引起的,可以考虑减少机器人的负载,尽量避免在负载高峰期使用机器人。此外,也可以考虑升级机器人的硬件设备,提升其负载承受能力。
3、如果跳闸是由于电源问题引起的,需要检查电源线路是否松动或损坏,并尝试更换电源适配器或使用稳定的电源。如果问题仍然存在,可能需要联系售后服务人员进行检修。
4、如果跳闸是由于软件故障或电路短路引起的,可以尝试重启机器人,看是否能够解决问题。如果问题仍然存在,可能需要升级或重新安装机器人的软件,或者联系人士进行检修或更换相关电路部件。
确保机器人正常运行在允许使用中。维护分期付款1.驱动风扇单元更换:驱动单元冷却风扇更换。2.防尘过滤器更换:控制柜防尘过滤器更换。3.接触器触点更换:控制柜接触器通常是打开且通常关闭的触点。4.丝更换:控制柜熔断器更换。5.电机上电指示器替换:控制柜操作面板电机电源按钮指示器更换四,标准维护报告摘要1.机器人标准维护后的建议2.机器人标准维护后适用于备件更多机器人维修保养咨询请到:篇:ABB机器人保养,机器人检修零点调整篇:ABB机器人保养|身体常规维护ABB机器人保养|身体常规维护::101返回ABB机器人身体常规维护ABB机器人工作状态确认ABB机器人维护确认机器人的机器人生产,确认机器人之前的日常维护至少1小时(改变油。 又能有效避免油封泄漏故障的措施,存在的问题(1)如果在减速机其他使用性能良好,而只是存在泄漏故障,则更换整台减速机会造成很大的浪费,(2)现在大部分减速机泄漏故障为轴头磨损,更换减速机,或在设备不具备长停机条件的。
工业机器人出现的通信报警(是CPU基板出现故障报警)。其故障下有细分三种故障,种情况显示的子代码是1代表控制电源接通时,从YCP01基板上没有回应;第二种情况子代码20则代表控制电源接通时,从选项基板1#处无应答;第三种情况子代码21表示的故障明细是控制电源接通时,从选项基板2#处无应答。深圳安川工业机器人系统通信报警故障原因分析:导致机器人出现通信报警故障原因可能是机器人驱动器的软件动作异常或者设定错误、YCP01或YCP02基板接触不良、YIF基板接触不良。深圳安川工业机器人系统通信报警故障维修对策:检查电源连通情况;检查YCP01和YCP02基板上的PCI插头;对基板上通信单元进行再次连接; 技术MOTOMAN机器人维修MOTOMAN机器人维修>安川MRC示教盒维修产品编:ProMOTOMAN机器人维修 |产品名称:安川MRC示教盒维修产品编:Pro208839产品安川MRC示教盒维修。
经验丰富,价格优惠,上机检测以及修复率,ABB伺服电机维修型ABB机器人伺服电机3HAC3403-1ABBROBOTICSPS60/4-90-P-LSS-45043HAC10557-1/0伺服电机ABBROBOTICSPS60/4-71-P-LSS-45023HAC10555-1/0伺服。
TgEfOguVtKf