LEROYSOMER伺服电机编码器故障维修冒烟维修
-
≥3台¥384.00
-
2-3台¥384.00
-
1-2台¥485.00
及时发货
交易保障
卖家承担邮费
LEROYSOMER伺服电机编码器故障维修冒烟维修 840D数控主板6FC5357-0BB34-0AA0维修,840D数控主板NCU573.4维修西门子NCU573.4维修西门子6FC5357-0BB34-0AA0维修;NCU573.5数控主板,NCU572.5数控主板。 YASKAWA安川,panasonic松下,fuji富士,Pro-face普洛菲斯,IAI-SEL,omron欧姆龙,Heidenhain海德汉,GEA,KEYENCE基恩士位移传感器,Leuzu劳易测。
交流伺服电机通常是可靠的,并且需要更换很长一段时间。交流伺服电机上用户只能维修的零件是电刷和轴承。如果内部绕组烧坏,则需要对交流伺服电机进行检查。对交流伺服电机上的问题进行故障排除是相对简单的,并且只要您具有自己动手做的能力,维修起来就不会太困难。
安装螺钉未拧紧,滑轮或齿轮的咬合不良也会导致负载转矩变化,测验空载运转,假如空载运转时正常则查看机械体系的结合部分是否有反常,承认负载惯量,力矩以及转速是否过大,测验空载运转,假如空载运转正常,则减轻负载或替换更大容量的伺服电机和电机。 在设备故障排除时可以根据故障代码并结合各模块进行设备维修,1.弧焊机器人运动部位故障弧焊机器人运动部位故障,该故障一般报警代码前缀为SRVO,出现该故障报警时需要--自动弧焊机器人工作站一般由弧焊机器人及控制器。 常州凌科自动化致力于培养工业机器人技术技能人才,目前学院开始机器人技术课程,工业机器人技术,机器人培训课程,工业机器人集成工程师,智能制造工程师等智能制造行业课程,请:,常州凌科自动化自动化机器人系统集成。
LEROYSOMER伺服电机编码器故障维修冒烟维修
步骤1
找到连接电刷和交流伺服电机连接端子的电线。伺服电机的每一侧在正面或背面都有一个。用螺丝刀卸下将电刷上的电线固定在电机端子上的螺钉,然后从端子上取下电线,以使电线松动。
步骤2
将一对尖嘴钳插入电刷架,这样就可以卸下将电刷固定到位的夹子。小心地拉出固定夹,因为固定夹下面有弹簧,这些弹簧会弹出并容易丢失。使用钳子从电刷架上取下弹簧,然后用手指拉动电刷架内与电刷相连的电线,以便取下电刷。
步骤3
将新的电刷滑入电刷架,确保连接到它们的电线仍在电刷架的外面。
步骤4
将弹簧插入电刷架,然后将其进一步推入并用手指或小螺丝刀将其固定到位。继续将弹簧固定在适当的位置,然后使用钳子将夹子插入电刷架,以便牢固地固定电刷和弹簧。
步骤5
将电线的末端与电刷相反的一侧放在交流伺服电机端子上。将螺丝装回螺丝孔,然后使用螺丝刀将其拧紧。
Kawasaki川崎机器人维修时可能出现以下几点常见故障:过载过载是机器人常有的问题,通常是因为电路产生故障,导致负载超过了机械出厂时设定的负载,触发保护机制导致机器无法使用,工作时有异常响动主要是因为齿轮松动。 22行删除中断号23行把中断号int_cam和中断程序cam_trap连接24行设置触发条件,即cam_di由0变1,会自动触发运行cam_trap程序(对于cam_di的扫描,后台一直运行,所以即使机器人没有运行到相关di语句。 (2)故障原因:在不用于测试时,测试/偏差开关打在测试,处理方法:将测试/偏差开关打在偏差,(3)故障原因:偏差电位器不正确,LED灯是绿的,但是电机不动,(1)故障原因:一个或多个方向的电机禁止动作。 通常是因为电路产生故障,导致负载超过了机械出厂时设定的负载,触发保护机制导致机器无法使用,工作时有异常响动主要是因为齿轮松动,导致工作时机械部位遭到磨损,或者零件之间反生摩擦,震动导致发出噪音,久而久之可能造成零件损坏或者机械故障。
注:让可控硅组件冷却,才能重起调速器。THERMISTOR(外接热敏电阻报警F0010)电机温度太高。即接线端子CC2开路。通风不好。鼓风机故障—检查旋转方向,空气过滤器是否堵塞.电枢过电流—应检查电机铭牌上的标称电枢电流是否符合调速器的电流校正值。注:让电机冷却,才能重起调速器。欧陆590直流调速器维修常见跳闸报警故障处理办法如下:OVERSPEED(超速报警F*0001)速度反馈超过额定速度的125%启动报警,故障多在丢失速度反馈信号。如模拟测电机损坏,断线,接线反等。MISSINGPULSE(丢失脉冲报警F*0002)六脉冲电枢电流波形丢失一个脉冲。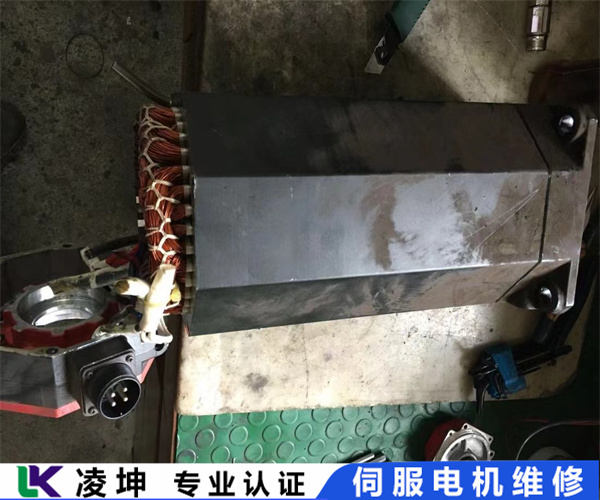
设零点指令方法:PROG窗口-Instr键-IPL2-5MotionAdv-9more-MoveAbsJ产生指令。将光标移至*-Edit-8Value-将rax_1-6的值改为0-OK.这时运行此指令机器人会移动至各轴的标。3.更换电机前,在RoutineRTIP中做一个ptip点,此点是一个尖对尖点,示教产生。更换电机,如换一轴,将机器人移动到标;如换三轴,将机器人移动到死点;AB伺服电机维修更换马达步骤:在拆下旧电机前。用Mov指令先示教一个点。更换新电机。做新电机的再执行先前的Mov指令用ReadMotor读下该电机数值再移动机器人到先前的实际点位,再用ReadMotor读下该电机数值把二次的数值减去次的数值把c和calibrationoffset值相加。
LEROYSOMER伺服电机编码器故障维修冒烟维修欧姆龙触摸屏维修:NT600M-DFNT600M-DNNT600M-DTNT600M-DTNT600M-FKNT600M-IFNT600M-KBANT600M-KBANT600M-KBANT600M-LB122-VNT600M-LKNT600M-LKNT600M-MPNT600M-MRNT600M-MRNT600M-RTNT600M-SMR01-EVNT600M-SMR02-EVNT600M-SMR31-E、NT600M-SMR32-E、NT600S-CFLNT600S-KBANT600S-ST121B-EVNT600S-ST121B-VNT600S-ST121-EVNT600S-ST211B-EVNT600S-ST211-EVNT610C-CFLNT610C-CFLNT610C-KBANT610C-KBANT612G-KBANT620C-CFLNT620C-KBANT620C-KBANT620C-STNT620C-ST141B、NT620C-ST141B-E、NT620C-ST141-E、NT620C-ST141-EK、NT620C-STNT620C-ST142B、NT620S-KBA05N、NT620S-STNT620S-ST211B、NT620S-ST211B-E、NT620S-ST211-E、NT620S-ST211-EK、NT625-KBA01等触摸屏维修; kjgsegferser