深圳生产晶圆扶梯多少钱一个
-
面议
及时发货
交易保障
卖家承担邮费
晶圆中200mm 阶段,采用晶圆输送机代替人手操作,排除人为带入的环境污染。随着IC 制造工艺的发展和对环境洁净度要求的提高,国外机器人研究机构在上世纪 80 年代开展了晶圆自动传输系统各部分的关键技术研究,研制出直接驱动电机、位移传感器等关键部件。
电机驱动滑块沿导轨导向运动,检测单元反馈位置信号控制机构运动,真空吸附单元与导轨滑块用连接块连接,跟随滑块运动运载晶圆,其上加装缓冲装置单元,使吸管与晶圆、晶圆与上下臂和吸盘接触过程中防止吸附的晶圆产生变形甚至破损,以及减小对电机的冲击。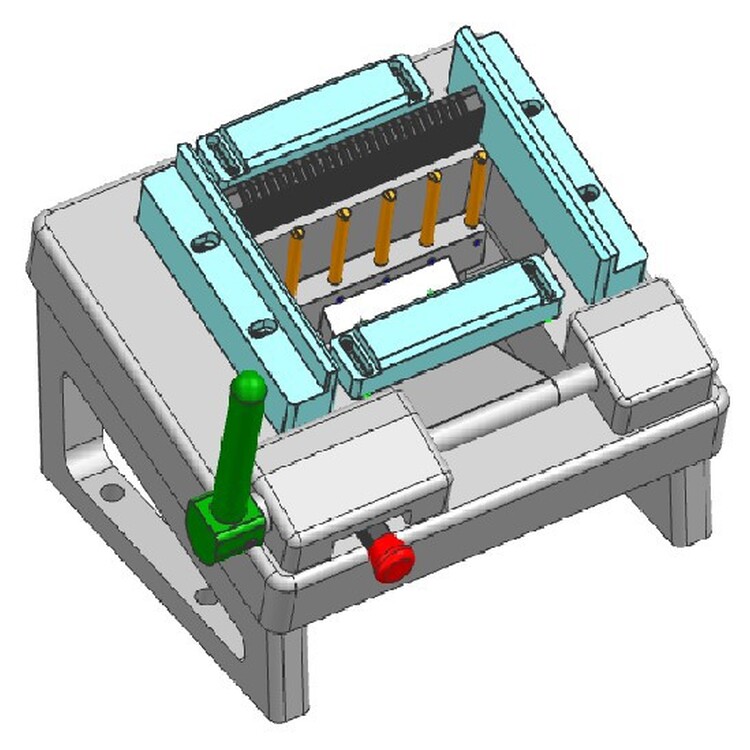
升降机构运动部件是整个机构的核心部件,完成升降运动是传输系统对机构的核心要求。通过的检测装置测量运动部件的位置,反映其运动速度、时间以及重要的定位情况。升降机构的定位精度直接影响晶圆到达工件台上的精度。
位移是物体在运动过程中位置变化,它与移动量有关。小位移通常用应变式、涡流式、差动变压器式、电感式、霍尔传感器来检测,大位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。本文采用测量直线位移量的传感器,具体有电感式位移传感器、电容式位移传感器、光电式位移传感器、超声波位移传感器、霍尔式位移传感器。
晶圆上表面有定位用的标识,晶圆在预对准阶段确定好了与传输机械手的相对位置,经过升降机构到达工件台吸盘上,为了检测标识位需要其与吸盘相对位置是固定的。因此要求升降机构在圆周方向上不存在转动。同时光栅传感器安装要求光栅尺与读数头相对位置在+0.1mm。防转装置能机构运动圆周方向相对位置,晶圆传输的精度。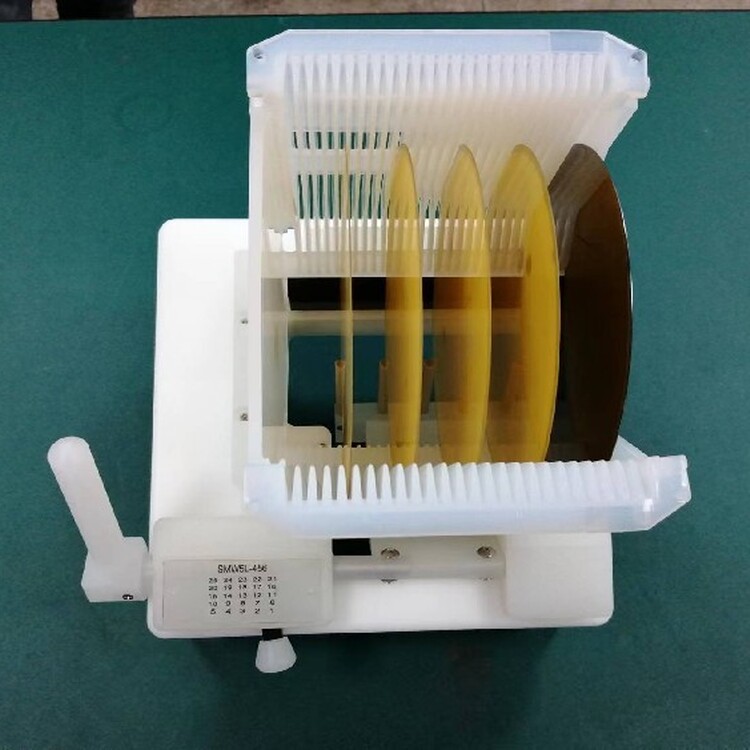
目前,半导体制程设备中,常常需要用电机通过传动带带动滚珠丝杆,来控制晶圆的升降。而传动带通过摩擦来传递动力,因此传动带要调整张紧力以获得合适的摩擦力。通过调整传动带的张紧度可以调整传动带和齿轮之间的摩擦力,传动带的张紧度可通过调节电机位置进行调整。另外传动带过紧会使传动带磨损严重,过松则易产生打滑现象,使传动带严重磨损甚至烧坏。
晶圆测试用升降机构,包括底座、托板,其特征是,底座上固定连接有若干个升降滑轨座,托板可升降连接在升降滑轨座上,底座上可滑动连接支撑座,支撑座设置在托板下方,支撑座上固定连接有丝杆螺母,底座上安装有驱动电机,驱动电机输出轴传动连接丝杆,丝杆与丝杆螺母配合连接,支撑座上设有斜块,斜块上端面为倾斜平面;托板上安装有滚轮,滚轮抵接在斜块上端面上,托板和底座之间安装有托板位移测量用光栅尺,驱动电机电连接编码器,光栅尺电连接编码器。
集成电路行业发展迅速,对芯片产品的良率要求日益增高,晶圆测试能够在芯片未进行切割、引线、封装等多重后道工序加工前进行测试,减少不良品在后续加工中的严重浪费,所以急需晶圆测试设备达到高速、、高稳定性的要求。晶圆测试设备达到高速、、高稳定性的要求关键在于升降机构。目前晶圆测试装备采用的升降机构顶升力较小,顶升稳定性较差,精度低,而且有些顶升机构结构复杂,制造成本尚。
随着制造工艺的进步,所加工的硅片直径越来越大,而器件特征尺寸在不断缩小,单位面积上能够容纳的集成电路数量剧增,成品率显著提高,单位产品的成本大幅度降低,可靠性等性能指标显著提升,促进了大生产的规模化。