重庆三激光维扫描价格
-
¥111.00
及时发货
交易保障
卖家承担邮费
如下操作步骤: 三维扫描仪获取的点云数据,导入逆向工程软件中,进行点云数据前期处理。主要过滤多余的噪音点,降低数据量特征的前期下。基本的建构方式,通过提取特征点云,再构建特征曲线。因为三维扫描仪获取充足的点云数据,为了获取被测物件特征,在此过程中会获取一些过于的点云数据。为了提取特征快速准备,提取特征点是的工作。一般提取特征点云,有些经验所致。好提取相交十字叉式的特征点云数据。因为,逆向工程设计的基本原则是: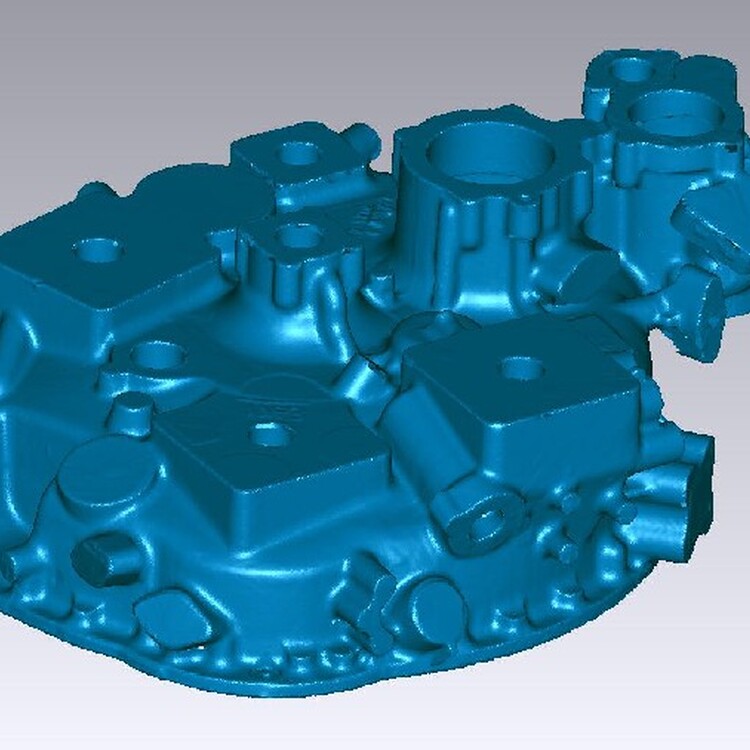
在调整特征曲面同时,需要将整个点云数据跳入。如图所示,提取的高阶曲面是红色区域,原始点云数据是淡蓝色区域。通过调整UV方向控制点,将曲面与实际点云数据匹配。在调整UV方向控制点的同时,需要参考实际点
云数据。只有提取的高阶曲面与实际点云数据足够贴近,且提取高阶曲面与实际点云的距离误差值在0.02mm以内。
如上图所示,只有在红色曲面与淡蓝色原始点云数据交叉重叠时,提取的高阶曲面方为佳。此时的高阶曲面,与实际点云的偏差距离在0.02mm以内,完成了高阶曲面提取工作。逐次类推逐个提取高阶曲面,将原始点云数据完全替代为有效的高阶曲面。
第四部: 重建CAD模型的检验与修正 采用根据获得的CAD模型重新测量和加工出样品的方法来检验重建的CAD模型是否满足精度或其他试验性能指标的要,对不满足要求者重复以上过程,直至达到零件的逆向工程设计要求。