OLYMPUS伺服电机不转维修冒烟维修
-
≥3台¥384.00
-
2-3台¥384.00
-
1-2台¥485.00
及时发货
交易保障
卖家承担邮费
因此有一管子有缺陷(一直导通)OOOXx=1=Phase1(U)x=3=Phase3(W)x=4=Phase1(U)或3(W)检查有缺陷管子(一直导通)的相F103Groundfault接地故障或功率部分故障在接地故障测试期电流从管子被触发的相中流出过电流比较器反应或在管子被触发的一相中UCE监控反。
OLYMPUS伺服电机不转维修冒烟维修
在开始维修之前,请确保关闭主电源,以防止触电。还应记住,这些电机是危险设备。如果您对操作电器不满意,建议始终与维修人员联系。另外,在操作眼镜之前,请务必戴好眼镜。
另外编码器的对位有不同的算法,使各个品牌产品缺少了共用性,造成维修的难度加大,伺服电机维修存在负载测试的难题,试机是一个技术看点,通常的小作坊较难修复的伺服电机试验过再出厂,基本上是感觉大概修复了。 应在查看方位操控单元和速度操控单元的一起,还应查看:脉冲编码器接线是否过错,脉冲编码器联轴节是否损坏,查看测速发电机端子是否接反和励磁信号线是否接错,一般这类现象应由的电路板维修技术人员处理,担任可能会形成更严重的结果。 OC2定速中过电流断路定速运行中当伺服电机输出电流达到或超过大约额定电流的200%时保护回路动作停止伺服电机输出取消负荷的变化伺服电机显示故障E,OC3减速中过电流断路减速运行中加速低速运行之外当伺服电机输出电流达到或超过大约额定电流的200%时保护回路动作停止伺服电机输出延长减速检查制动动作伺。
对直流伺服电机问题进行故障排除或进行预防性维护时的典型检查。
1.通常通过开槽的螺丝起子卸下盖子来卸下弹簧和刷子。
2.拆卸时检查电刷是否可以自由移动
3.检查所有刷子上的弹簧张力是否相等
4.检查刷子的表面-它应该发亮或抛光,这表明接触良好。如果不更换
5.检查刷子的长度。新的典型fanuc DC伺服电机电刷长约.75英寸。长度越短,电刷上的弹簧张力就越小。
6.取下盎司刷,用手电筒照亮内部,看是否在换向器或外壳上堆积了电刷。使用空气管线/清洁空气供应将其吹走。清洁所有换向器凹槽和电刷区域之间。如果是黑色,则在换向器上用细砂纸打磨。
7.检查电刷摩擦在换向器上是否有磨损槽。如果严重磨损或凹陷,请考虑更换。
定期维修有助于大程度地减少问题。您可以将伺服电机交给公司进行常规维修,也可以按照制造商的准则自行维修。一些基本的维护技巧包括清洁灰尘和污垢,润滑轴承以及在必要时绝缘绕组。
奥林巴斯olympus,日本电装denso.大隈铁工所okuma。三木mikipulley,名机meiki,昭和showa,servex,森泰克sumtak,oriental,kawamataseiki川俣精机,光洋koyo,大金daikin等伺服电机维修:台达delta。颂达科stk,东元teco等伺服马达维修德国:宝茨bautz,塞德尔seidel。伦茨lenze,鲍米勒baumuller,西门子siemens,库卡kuka,倍加福pepperl+fuchs,elau,特吕茨勒trutzschler,hubner霍伯纳,schneider施耐德。冯哈伯faulhaber,amk,andrive安德拉斯系统。
爱普生机器人控制器维修,显示故障:无法启动,无法连接,通讯不上,无法校正,开不了机,开机报错,控制器异响,爱普生本体异响,EPSON爱普生工业机器人控制器RC700-A维修中心常州凌科自动化科技有限公司安川YASKAWA机器人电源控制器CSTR-COB02AA维修伺服电机故障维修咨询常州凌科自动化科。 6SE7012-0TP60-Z维修,6SE7012-0TP70维修,6SE7013-0EP50维修,6SE7013-0EP50-Z维修,6SE7013-0EP60维修,6SE7013-0EP70维修,6SE7013-0ES87-1FE0维修。 克鲁斯机器人维修,安川机器人伺服电机维修KUKA机器人伺服电机常见故障:库卡伺服电机系统软件故障库卡示教盒无法进入系统故障库卡示教编程器无法启动库卡伺服电机电路板短路库卡伺服电机急停按键失效或不灵(更换急停按键)库卡机器人伺服电机触摸不良或局部不灵。 ABB机器人伺服电机保养1)断掉伺服电机的所有供电电源,2)检查主机板,存储板,计算板,以及驱动板,,3)检查柜子里面无杂物,灰尘等,查看密封性4)检查接头是否松动,电缆是否松动或者破损的现象,5)检查风扇是否正常。
脉冲编码器电源电压太低(此时调整电源15V电压。使主电路板的+5V端子上的电压值在4.95-5.10V内);没有输人脉冲编码器的一转信号而不能正常执行参考点返回。六.伺服系统报警:伺服系统故障时常出现如下的报警号,如FANUC6ME系统的456伺服报警;STEMENS880系统的1364伺服报警;STEEMENS8系统的104等伺服报警。此时应检查:轴脉冲编码器反馈信号断线、短路和信号丢失,用示渡器测A、B相一转信号,看其是否正常;编码器内部故障。造成信号无法正确接收,检查其受到污染、太脏、变形等。(1)西门子伺服电机维修之OH报警。七.OH为速度控制单元过热报警,发生这个报警的可能原因有:印制电路板上S1设定不正确。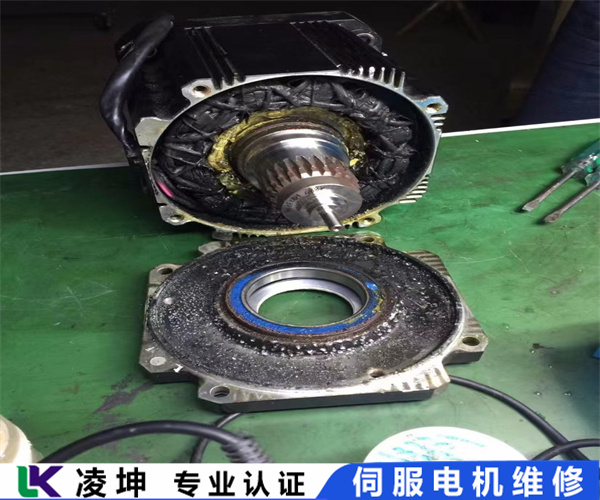
OLYMPUS伺服电机不转维修冒烟维修输出侧是否有短路,或接地等情形aab500百德福刹车回路故障伺服电机送修oh1b500百德福散热座过热1.检查散热座风扇是否正常,散热座为何高温2.检查伺服电机周围温度是否低于45度oh2b500百德福散热座过热1.检查散热座风扇是否正常,散热座为何高温2.检查伺服电机周围温度是否低于45度ol1b500百德福马达过载减低负载ol2b500百德福伺服电机过载减低负载。延长加速ol3b500百德福过转矩检出减低负载,延长加速scb500百德福负载短路1.马达线间阻抗检查2.马达相间绝缘电阻检查ef0b500百德福外部控制的传输回路异常检查外部回路是否异常ef2b500百德福控制端子2外部异常由u-07确认异常输入的端子再依所设定的异常情形进行检修ef3b500百德福控制端子3外部异常由u-07确认异常输入的端子再依所设定的异常情形进行检修ef4b500百德福控制端子4外部异常由u-07确认异常输入的端子再依所设定的异常情形进行检修ef5b500百德福控制端子5外部异常由u-07确认异常输入的端子再依所设定的异常情形进行检修ef6b500百德福控制端子6外部异常由u-07确认异常输入的端子再依所设定的异常情形进行检修spb500百德福直流回路波动过大1.检查输入侧的端子是否锁紧2.检查输入电源电压spob500百德福输出缺相1.检查输出侧的端子是否锁紧2.检查输出侧的配线是否正常3.检查马达的三相阻抗是否正常ceb500百德福modbus传送异常检查传输机器或传送信号是否正常cpf0b500百德福控制回路异常1.再重新插入数字操作器2.检查控制回路的配线3.更换控制板cpf1b500百德福控制回路异常1.再重新插入数字操作器2.检查控制回路的配线3.更换控制板cpf4b500百德福eepom不良更换控制板cpf5b500百德福a/d变换器不良更换控制板新款机型b502系列(代替:bbbbb300系列)b502-2001。 kjgsegferser