北京进口机车新型电子添乘系统售后保障
-
面议
及时发货
交易保障
卖家承担邮费
当道口机器人检测到距道口100-2000米的机车时,用户可以用配套的距离设置软件进行位置定位编辑,机车上面安装有位置定位接收模块,用基于两点的无线空间位置算法,计算出该机车接近道口的距离与来车方向,如果在提醒的距离内,车上的设备会主动给道口机器人命令,打开语音提醒,列车来了,请行人注意安全,同时视觉识别道口行车与机动车的状况,并实时传输到列车驾驶室;机器人检测到列车完全通过道口后,道口机器人发出关闭命令,无线视频传输关闭,屏显显示红灯,道口信号机停止报警;列车驶离下一处接近点后,机器人恢复初始状态,检测下一列车到来。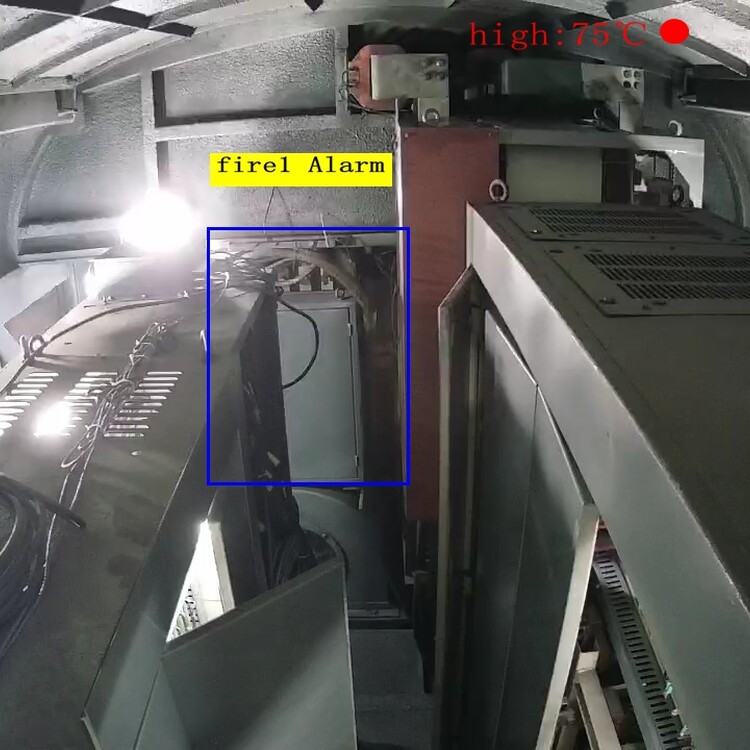
铁路调车顶送作业,是指利用铁路调车机车或者本务机车,从后端连挂一组货车车列进行推送的调车作业,即机车相对于推送方向,位于车列的尾部。由此带来的一个问题,是司机看不到车列前进方向上的线路情况,无法对线路断道、障碍物等各种意外情况做出及时反应,从而导致调车安全事故出现。为了解决司机瞭望不良的问题,全路主要采用人员扒车瞭望的方式,通过调车手台用语音将前方路况通知司机。人员扒车瞭望,是指调车长一名制动员或连接员,扒在车列前端辆车侧面,通过侧身瞭望前方路况,并在异常情况下发出语音报警。上述方式存在严重的安全隐患问题,且作业极为艰苦。作业人员扒车作业,属于露天作业,在极热极寒、雨雪雷电、光线不好等环境下,尤其在长距离顶送作业中对人员的体力也是的考验,由于疲劳、疏忽造成人员打滑从车上跌落,形成压死、压伤人员的安全事故。这是铁路调车顶送作业的一大安全痛点。因此,开发一种铁路调车顶送作业安全智能防护方法,用技防取代人防显得尤为重要。
龙铁高科机车AI运用安全防疫系统功能十分,不仅能对司乘人员身份状态进行识别,判断是否是司乘人员还能对司乘人员进行行为识别,判断是否有违规操作行为,如打电话,抽烟、瞭望,精力不集中、体温检测等。
路况环境的识别,不仅对摄像机的距离,天气变化情况进行抑制,还能实时识别红绿灯状态,道岔的开与合,弯道的状态,道口的行人与车抢道场景进行实时预警,摄像头的角度、距离、光线等对算法的识别有效性有较高要求,再加上不同的运动轨迹,以及遮挡和雨雾天都十分考验算法的抗干扰能力。