南充三次元精度检测
-
面议
及时发货
交易保障
卖家承担邮费
1定位精度的检测
检测机床的定位精度,常用标准有两种:
●德国VDI/DGQ3441标准(机床运行精度和定位精度的统计方法)。
●美国AMT标准(美国机械制造技术协会制定)。
用两个标准,测量数据的整理均采用数理统计方法。即沿平行于坐标轴的某
一测 量轴线选取任意几个定位点(- -般为5~15个),然后对每个定位点重复进行
多次定位(一般为5~13次)。可单向趋近定位点,也可以从两个方向分别趋近,
然后对测量数据进行统计处理,求出算术平均值。进而求出平均值偏差、标准差、
分散度。分散度代表重复定位精度,它和平均值偏差一起构成定位精度, 两者之
和是在任意两点间定位时可能达到的大定位偏差。
由于被测坐标轴长度不尽相同,因而其定位精度的线性允差的给定方式不应
是单一的,而应有所区别。国标GB10931-89数字控制机床位置精度的评定方法
中规定,轴线定位精度线性允差的给定方式主要有以下几种:
●在全行程上规定允差;
, 根据被测对象长度分段规定允差;
●用局部公差方式规定允差;
既规定局部公差,同时也规定全行程允差。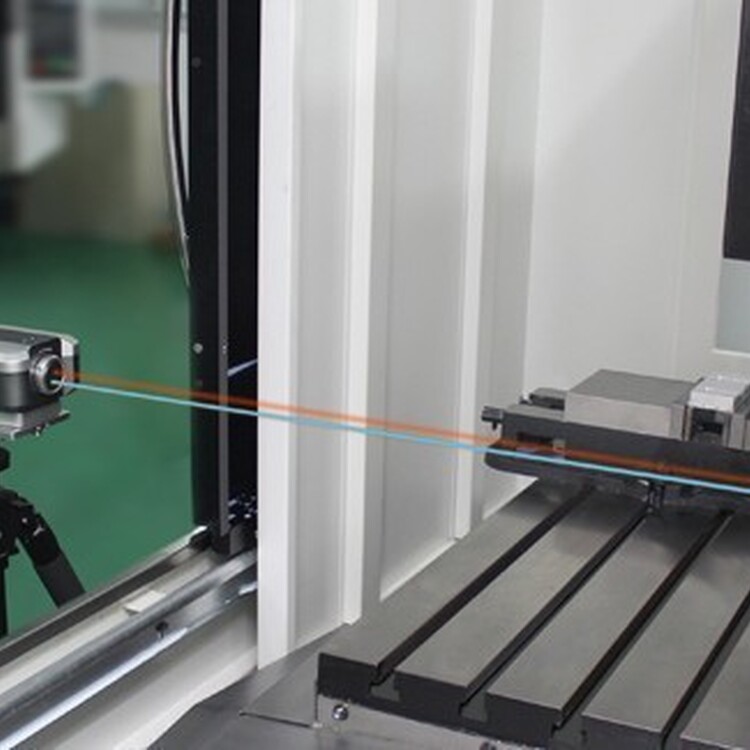
工业机器人依据的检测标准是什么?
电工电子业务基础环境试验低温试验GB/T2423.1-2008
电工电子业务基础环境试验高温试验GB/T 2423.2-2008
电工电子业务基础环境试验恒定湿热试验GB/T 2423.3-2006
电工电子业务基础环境试验振动(正弦)试验GB/T 2423.10-2008
电磁兼容都可以用标准居住、商业和轻工业环境中的抗扰度试验GB/T17799.1-1999
电磁兼容都可以用标准工业环境中的抗扰度试验GB/T17799.2-2003
电磁兼容都可以用标准居住、商业和轻工业环境中的发射GB/T17799.3-2012
电磁兼容都可以用标准工业环境中的发射GB/T17799.4-2012
根据固定式和移动式区分测试状态和测试项目
1、发射标准
a)固定式服务机器人:
应在正常工作模式下进行全部项目的测试。
b)移动服务机器人:
应在充电模式、工作模式及回充寻找模式下分别进行测试,测试项目为:
1)充电模式(本体+充电器) : 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰;
2)工作模式(本体) : 辐射骚扰;
3)回充寻找模式(本体+充电器) : 谐波电流、电压波动与闪烁、传导骚扰、辐射骚扰。
2、抗扰度标准:
1 )移动服务机器人:
应在充电模式、工作模式和回充寻找模式状态下分别进行测试,测试项目为: .
--充电模式(机器人本体连接充电器) : 适用的全部测试项目;
--回充寻找模式:适用的全部测试项目
--工作模式(机器人本体) :工频磁场、射频电磁场、静电放电。
工作模式测试状态:服务机器人应在以绝缘支架支撑底部确保机器人悬空的状态下,以60% ~ 80%的高速度或典型速度进行试验,选择典型速度。
2 )固定式服务机器人: