Z轴末端负载50-2900kg重复定位精度±0.1mm品牌广州第七轴
大跨度桁架机器人在自动化生产线中应用,可以完成危险、重复枯燥的工作,尤其在高/低温、粉尘、有毒气体和放射性等恶劣的环境中,大跨度桁架机器人代替人工进行正常的工作,意义更为重大。因此,在机械加工、冲压、铸造、焊接、热处理、电镀、喷漆、装配以及物流运输业等方面得到越来越广泛的应用。

大跨度桁架机器人的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。

大跨度桁架机器人的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。

减少摩擦作为大跨度桁架机器人的工作条件之一,大跨度桁架机器人也应尽可能减少机械间隙带来的运动误差。因此,在设计桁架机械手时,机械手各关节的承载距离应尽可能远。它可以很小,每个关节都应该有一个可靠且易于调整的轴承间隙调节机构。

大跨度桁架机械手的结构尺寸应满足机械手工作空间的要求。工作空间的形状和大小与机械臂的长度和臂关节的转动范围密切相关。但是,桁架机械臂末端的工作空间考虑了腕关节的空间姿态要求。如果对手腕姿势提出具体要求,则手臂末端可达空间小于上述工作空间,未考虑手腕姿势。

在进行工作操作时,还注意相关的检查和维护工作。当机械手不工作或暂时停止时,制动开关恢复原位,大跨度桁架机器人停在空闲位置,以防止外力影响机械手和随意转动而损坏机械手。设备损坏人员。
大跨度桁架机器人的主要功能就是实现工件的轨迹运动,因此工件的重量参数即为重要,轻者不能满足运动需求,重者还会引发安全事故,且机械手的负载能力远超过工件的重量,具体负载能力还需要根据运行速度和工件的重要来确定。

大跨度桁架机器人需要及时添加润滑脂,桁架机械手的滚珠丝杆和直线导轨在使用一定的时间以后,需要及时加注的锂基润滑脂,保持润滑而可以减少因为干燥摩擦产生影响。

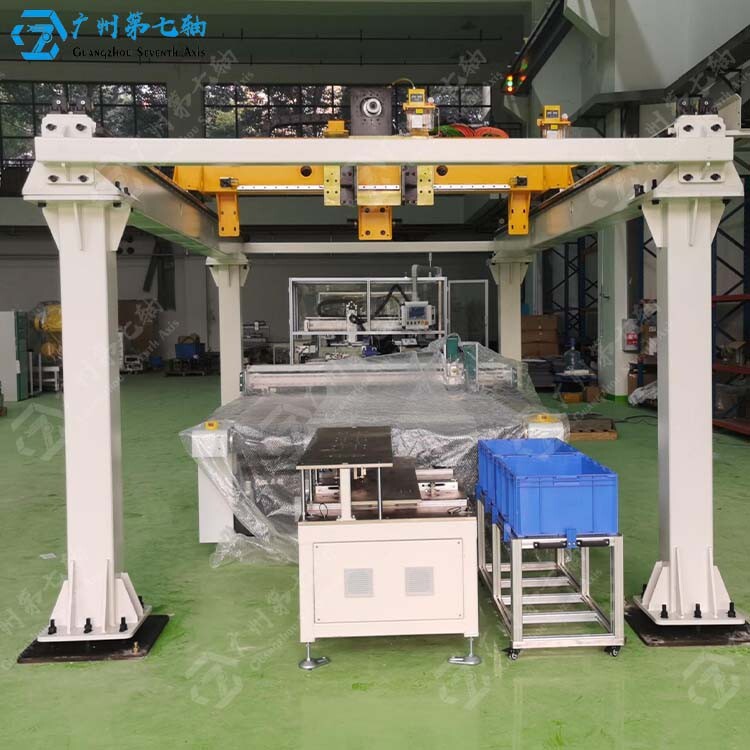
桁架式机器人多自由度运动,兼顾的活动范围更大,可更自由的在空间区域运行 ;有更的安装条件,可利用厂房现有牛角,可利用上层空间,不占用地面区域