汉川川崎喷涂机器人
-
面议
及时发货
交易保障
卖家承担邮费
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教。喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。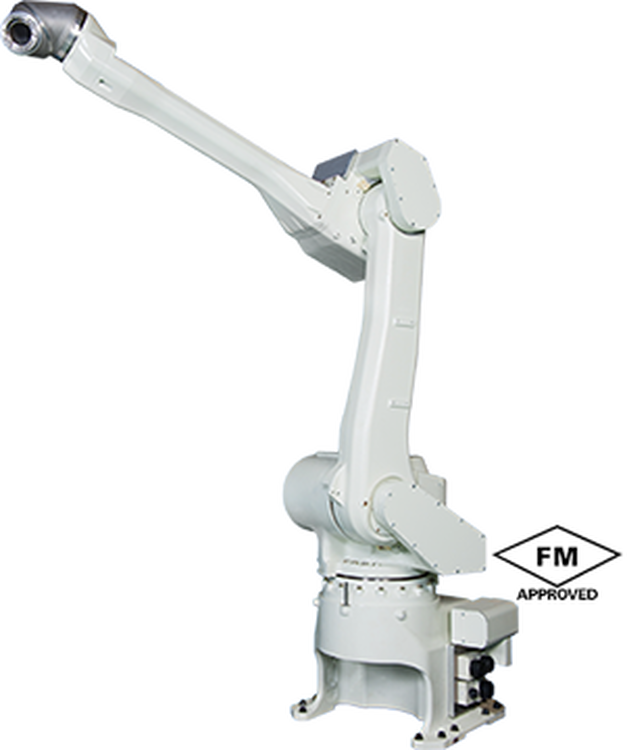
机器人的工作轨迹范围。在选择机器人时需机器人的工作轨迹范围能够完全覆盖所需施工的工件的相关表面或内腔。机器人的重复精度。对于涂胶机器人而言,一般重复精度达到0.5mm即可。而对于喷漆机器人,重复的精度要求可低一些。
涂装效率是喷涂作业效率,包含单位时间的喷涂面积、涂料和喷涂面积的有效利用率。涂着效率是喷涂过程中涂着在被涂物上的涂料量与实际喷出涂料总量之比值,或被涂物面上的实测厚膜与由喷出涂料量计算的涂膜厚度之比,也就是涂料的传输效率(transfer efficency 简称TE)或涂料利用率。涂装有效率是指实际喷涂被涂物的表面积与喷枪运行的覆盖面积之比;为使被涂物的边断部位的涂膜完整,一般喷枪运行的覆盖面积应大于被涂物的面积。